
Instruction manual







5 - 16
5 SERVO PROGRAMS FOR POSITIONING CONTROL
5.3 Positioning Data
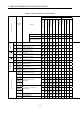
The positioning data set in the servo programs is shown in Table 5.3.
Table 5.3 Positioning data
Setting value using MT Developer
Setting range
Name Explanation
Default
value
mm inch degree PLS
Parameter block
No.
• Set based on which parameter block
deceleration processing at the acceleration/
deceleration processing and STOP input.
1 1 to 64
Axis
• Set the starting axis.
• It becomes the interpolation starting axis No.
at the interpolation.
1 to 32
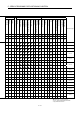
Absolute data
method
Address
Set the positioning address as an
absolute method with an absolute
address.
-214748364.8
to 214748364.7
[
µ
m]
-21474.83648
to
21474.83647
0 to 359.99999
-2147483648
to
2147483647
Expect for the speed/position switching control
0 to 2147483647
Speed/position switching control
Address/travel value
Incremental
data method
Travel
value
Set the positioning address as an
incremental data method with a travel
value. Travel direction is indicated by
the sign. Only positive settings can
be made at the speed/position
control.
Positive : Forward rotation
(address increase direction)
Negative: Reverse rotation
(address decrease direction)
0 to
214748364.7
[
µ
m]
0 to
21474.83647
0 to
21474.83647
0 to
2147483647
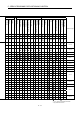
Command speed
• Sets the positioning speed.
• Units for speed are the "control units" set in
the parameter block.
• It becomes the vector speed/long-axis
reference speed/reference axis speed at the
interpolation starting. (PTP control only)
0.01 to
6000000.00
[mm/min]
0.001 to
600000.000
[inch/min]
0.001 to
2147483.647
[degree/min]
(Note-5)
1 to
2147483647
[PLS/s]
Dwell time
• Set the time until outputs the positioning
complete signal (M2401+20n) after
positioning to positioning address.
0[ms] 0 to 5000[ms]
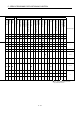
M-code
• Set the M-code.
• Set for each point at the speed-switching
control and constant-speed control.
• Updated it at the start or specified point.
0 0 to 32767
Common Settings
Torque limit value
• Set the torque limit value.
• The torque limit is performed based on the
parameter block data at the start. The speed-
switching control can be set for each point
and the setting torque limit values can be
performed with the specified point.
Torque limit
setting
valued [%]
in the
parameter
block
1 to 1000[%]