
User`s guide










Table Of Contents
- Preface
- Quick Start
- LTI Models
- Introduction
- Creating LTI Models
- LTI Properties
- Model Conversion
- Time Delays
- Simulink Block for LTI Systems
- References
- Operations on LTI Models
- Arrays of LTI Models
- Model Analysis Tools
- The LTI Viewer
- Introduction
- Getting Started Using the LTI Viewer: An Example
- The LTI Viewer Menus
- The Right-Click Menus
- The LTI Viewer Tools Menu
- Simulink LTI Viewer
- Control Design Tools
- The Root Locus Design GUI
- Introduction
- A Servomechanism Example
- Controller Design Using the Root Locus Design GUI
- Additional Root Locus Design GUI Features
- References
- Design Case Studies
- Reliable Computations
- Reference
- Category Tables
- acker
- append
- augstate
- balreal
- bode
- c2d
- canon
- care
- chgunits
- connect
- covar
- ctrb
- ctrbf
- d2c
- d2d
- damp
- dare
- dcgain
- delay2z
- dlqr
- dlyap
- drmodel, drss
- dsort
- dss
- dssdata
- esort
- estim
- evalfr
- feedback
- filt
- frd
- frdata
- freqresp
- gensig
- get
- gram
- hasdelay
- impulse
- initial
- inv
- isct, isdt
- isempty
- isproper
- issiso
- kalman
- kalmd
- lft
- lqgreg
- lqr
- lqrd
- lqry
- lsim
- ltiview
- lyap
- margin
- minreal
- modred
- ndims
- ngrid
- nichols
- norm
- nyquist
- obsv
- obsvf
- ord2
- pade
- parallel
- place
- pole
- pzmap
- reg
- reshape
- rlocfind
- rlocus
- rltool
- rmodel, rss
- series
- set
- sgrid
- sigma
- size
- sminreal
- ss
- ss2ss
- ssbal
- ssdata
- stack
- step
- tf
- tfdata
- totaldelay
- zero
- zgrid
- zpk
- zpkdata
- Index
lqgreg
11-118
In discrete time, you can form the LQG regulator using either the prediction
of basedonmeasurementsupto , orthe currentstate
estimate based on all available measurements including . While
the regulator
is always well-defined, the current regulator
is causal only when is invertible (see
kalman for the notation). In
addition, practical implementations of the current regulator should allow for
the processing time required to compute once the measurements
become available (this amounts to a time delay in the feedback loop).
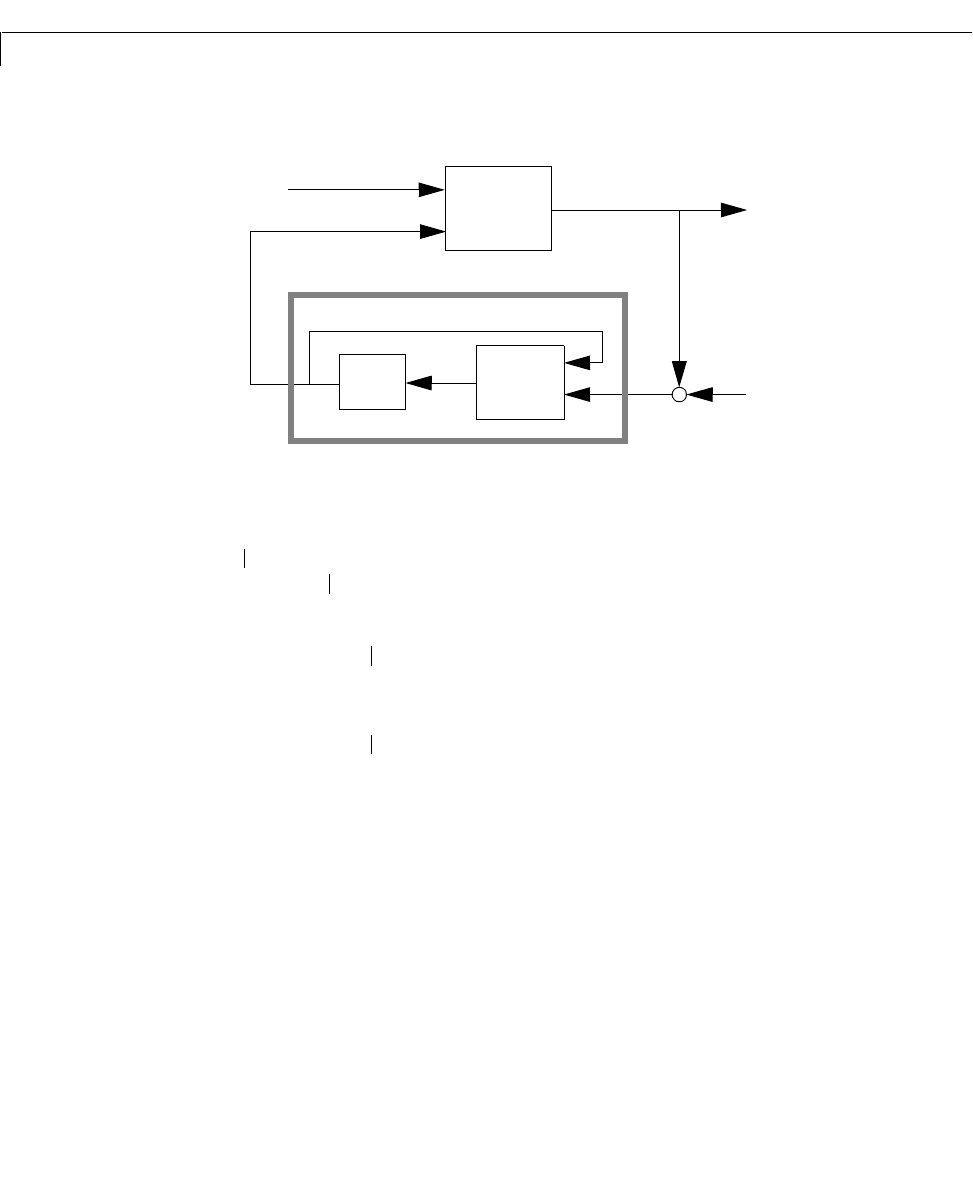
Usage rlqg = lqgreg(kest,k) returnsthe LQG regulator rlqg (a state-space model)
given the Kalman estimator
kest and the state-feedback gain matrix k.The
same function handles both continuous- and discrete-time cases. Use
consistent tools to design
kest and k:
u
y
+
+
x
ˆ
K–
LQG regulator
u
Plant
Measurement
noise
Kalman
filter
Process
noise
y
v
x
ˆ
nn 1–[]
xn
[]
y
v
n 1
–[]
x
ˆ
nn[]
y
v
n
[]
un[] Kx
ˆ
nn 1–[]–=
un[] Kx
ˆ
nn[]–=
IKMD
–
un
[]
y
v
n
[]