
User`s guide










Table Of Contents
- Preface
- Quick Start
- LTI Models
- Introduction
- Creating LTI Models
- LTI Properties
- Model Conversion
- Time Delays
- Simulink Block for LTI Systems
- References
- Operations on LTI Models
- Arrays of LTI Models
- Model Analysis Tools
- The LTI Viewer
- Introduction
- Getting Started Using the LTI Viewer: An Example
- The LTI Viewer Menus
- The Right-Click Menus
- The LTI Viewer Tools Menu
- Simulink LTI Viewer
- Control Design Tools
- The Root Locus Design GUI
- Introduction
- A Servomechanism Example
- Controller Design Using the Root Locus Design GUI
- Additional Root Locus Design GUI Features
- References
- Design Case Studies
- Reliable Computations
- Reference
- Category Tables
- acker
- append
- augstate
- balreal
- bode
- c2d
- canon
- care
- chgunits
- connect
- covar
- ctrb
- ctrbf
- d2c
- d2d
- damp
- dare
- dcgain
- delay2z
- dlqr
- dlyap
- drmodel, drss
- dsort
- dss
- dssdata
- esort
- estim
- evalfr
- feedback
- filt
- frd
- frdata
- freqresp
- gensig
- get
- gram
- hasdelay
- impulse
- initial
- inv
- isct, isdt
- isempty
- isproper
- issiso
- kalman
- kalmd
- lft
- lqgreg
- lqr
- lqrd
- lqry
- lsim
- ltiview
- lyap
- margin
- minreal
- modred
- ndims
- ngrid
- nichols
- norm
- nyquist
- obsv
- obsvf
- ord2
- pade
- parallel
- place
- pole
- pzmap
- reg
- reshape
- rlocfind
- rlocus
- rltool
- rmodel, rss
- series
- set
- sgrid
- sigma
- size
- sminreal
- ss
- ss2ss
- ssbal
- ssdata
- stack
- step
- tf
- tfdata
- totaldelay
- zero
- zgrid
- zpk
- zpkdata
- Index
feedback
11-73
11feedback
Purpose Feedback connection of two LTI models
Syntax sys = feedback(sys1,sys2)
sys = feedback(sys1,sys2,sign)
sys = feedback(sys1,sys2,feedin,feedout,sign)
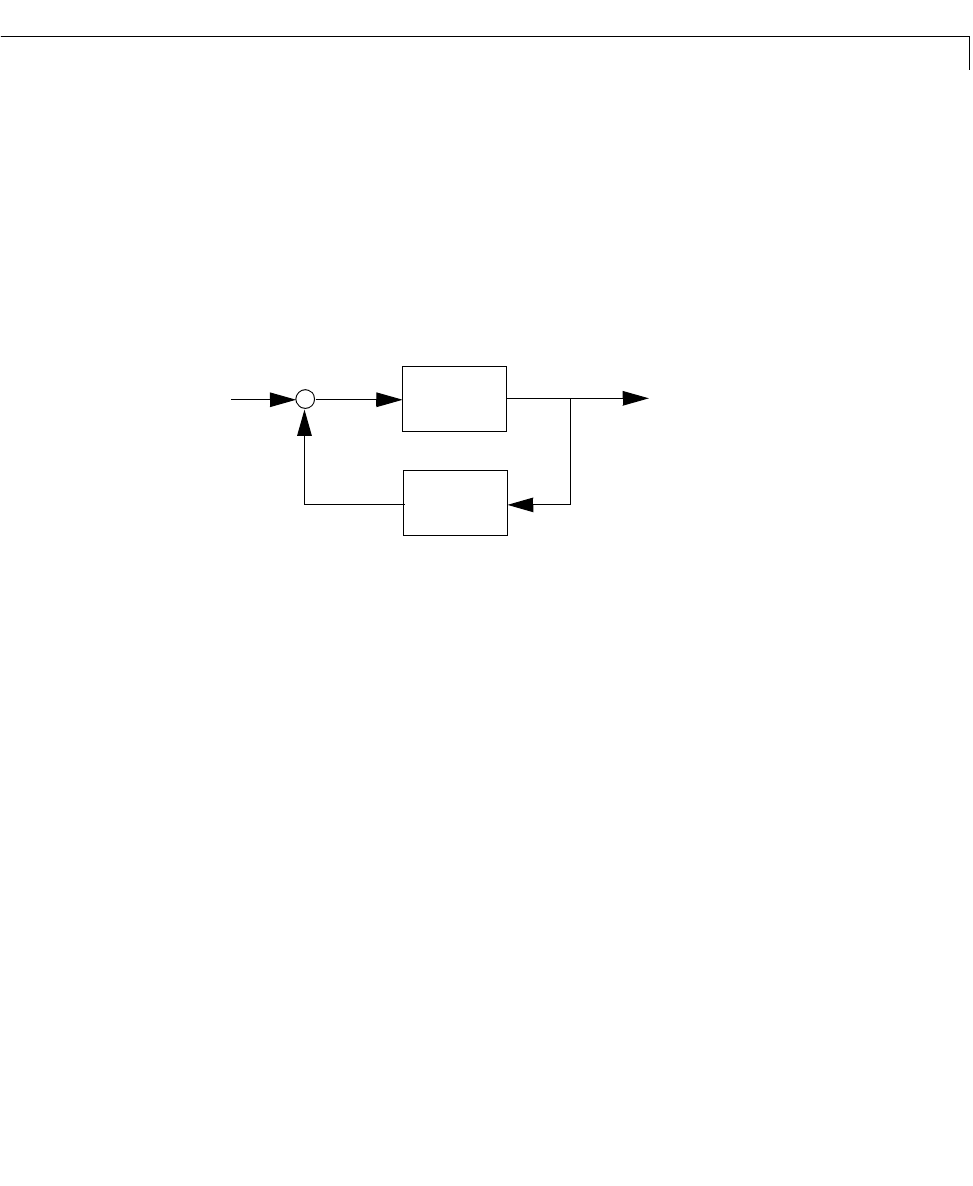
Description sys = feedback(sys1,sys2) returns an LTI model sys for the negative
feedback interconnection.
The closed-loop model
sys has as input vector and as output vector. The
LTI models
sys1 and sys2 must be both continuous or both discrete with
identical sample times. Precedence rules are used to determine the resulting
model type (see “Precedence Rules” on page 2-5).
To apply positive feedback, use the syntax
sys = feedback(sys1,sys2,+1)
By default, feedback(sys1,sys2) assumes negative fee dback and is
equivalent t o
feedback(sys1,sys2,–1).
Finally,
sys = feedback(sys1,sys2,feedin,feedout)
sys1
sys2
–
+
u
y
u
y