
Specifications










Table Of Contents
- Introduction
- LTI Models
- Operations on LTI Models
- Model Analysis Tools
- Arrays of LTI Models
- Customization
- Setting Toolbox Preferences
- Setting Tool Preferences
- Customizing Response Plot Properties
- Design Case Studies
- Reliable Computations
- GUI Reference
- SISO Design Tool Reference
- Menu Bar
- File
- Import
- Export
- Toolbox Preferences
- Print to Figure
- Close
- Edit
- Undo and Redo
- Root Locus and Bode Diagrams
- SISO Tool Preferences
- View
- Root Locus and Bode Diagrams
- System Data
- Closed Loop Poles
- Design History
- Tools
- Loop Responses
- Continuous/Discrete Conversions
- Draw a Simulink Diagram
- Compensator
- Format
- Edit
- Store
- Retrieve
- Clear
- Window
- Help
- Tool Bar
- Current Compensator
- Feedback Structure
- Root Locus Right-Click Menus
- Bode Diagram Right-Click Menus
- Status Panel
- Menu Bar
- LTI Viewer Reference
- Right-Click Menus for Response Plots
- Function Reference
- Functions by Category
- acker
- allmargin
- append
- augstate
- balreal
- bode
- bodemag
- c2d
- canon
- care
- chgunits
- connect
- covar
- ctrb
- ctrbf
- d2c
- d2d
- damp
- dare
- dcgain
- delay2z
- dlqr
- dlyap
- drss
- dsort
- dss
- dssdata
- esort
- estim
- evalfr
- feedback
- filt
- frd
- frdata
- freqresp
- gensig
- get
- gram
- hasdelay
- impulse
- initial
- interp
- inv
- isct, isdt
- isempty
- isproper
- issiso
- kalman
- kalmd
- lft
- lqgreg
- lqr
- lqrd
- lqry
- lsim
- ltimodels
- ltiprops
- ltiview
- lyap
- margin
- minreal
- modred
- ndims
- ngrid
- nichols
- norm
- nyquist
- obsv
- obsvf
- ord2
- pade
- parallel
- place
- pole
- pzmap
- reg
- reshape
- rlocus
- rss
- series
- set
- sgrid
- sigma
- sisotool
- size
- sminreal
- ss
- ss2ss
- ssbal
- ssdata
- stack
- step
- tf
- tfdata
- totaldelay
- zero
- zgrid
- zpk
- zpkdata
- Index
10 Design Case Studies
10-20
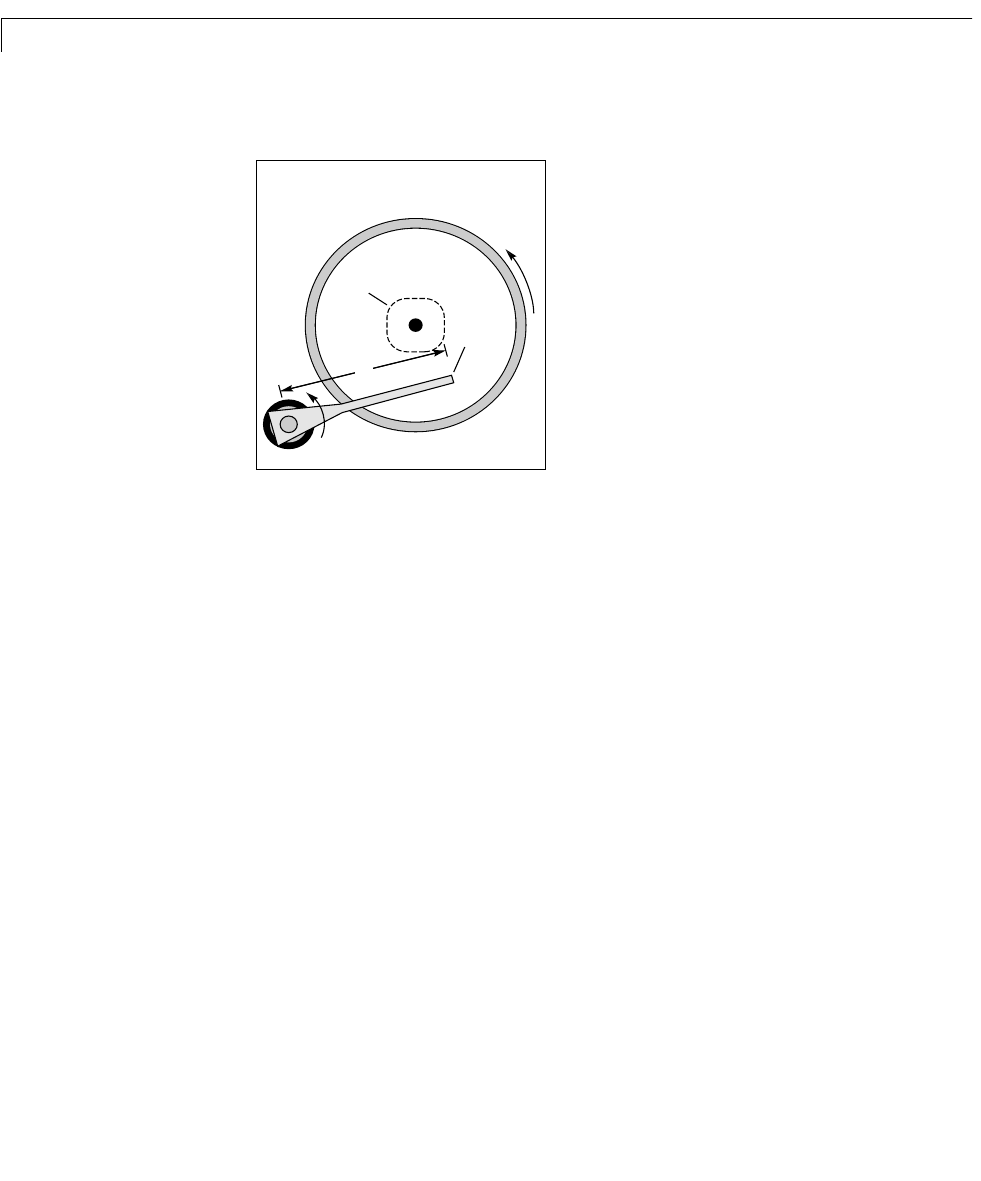
Hard-Disk Read/Write Head Controller
This case study demonstrates the ability to perform classical digital control
design by going through the design of a computer hard-disk read/write head
position controller.
Using Newton’s law, a simple model for the read/write head is the differential
equation
where is the inertia of the head assembly, is the viscous damping
coefficient of the bearings, is the return spring constant, is the motor
torque constant, is the angular position of the head, and is the input
current.
Taking the Laplace transform, the transfer function from to is
Using the values kg , Nm/(rad/sec), Nm/rad,
and Nm/rad, form the transfer function description of this system.
At the MATLAB prompt, type
J = .01; C = 0.004; K = 10; Ki = .05;
Hard Disk Drive
Disk Platen
Disk Drive Motor
Read/Write
Head
Solenoid
Ω
θ
l
J
d
2
θ
dt
2
----------
C
d
θ
dt
-------
K
θ
++ K
i
i=
JC
KK
i
θ
i
i
θ
Hs
()
K
i
Js
2
Cs K++
----------------------------------
=
J 0.01= m
2
C 0.004= K 10=
K
i
0.05=