
Operation Manual










37
A7 MIG Welder© Kemppi Oy 2018 1804
INTEGRATION GUIDE
6. DIGITAL ROBOT INTERFACE
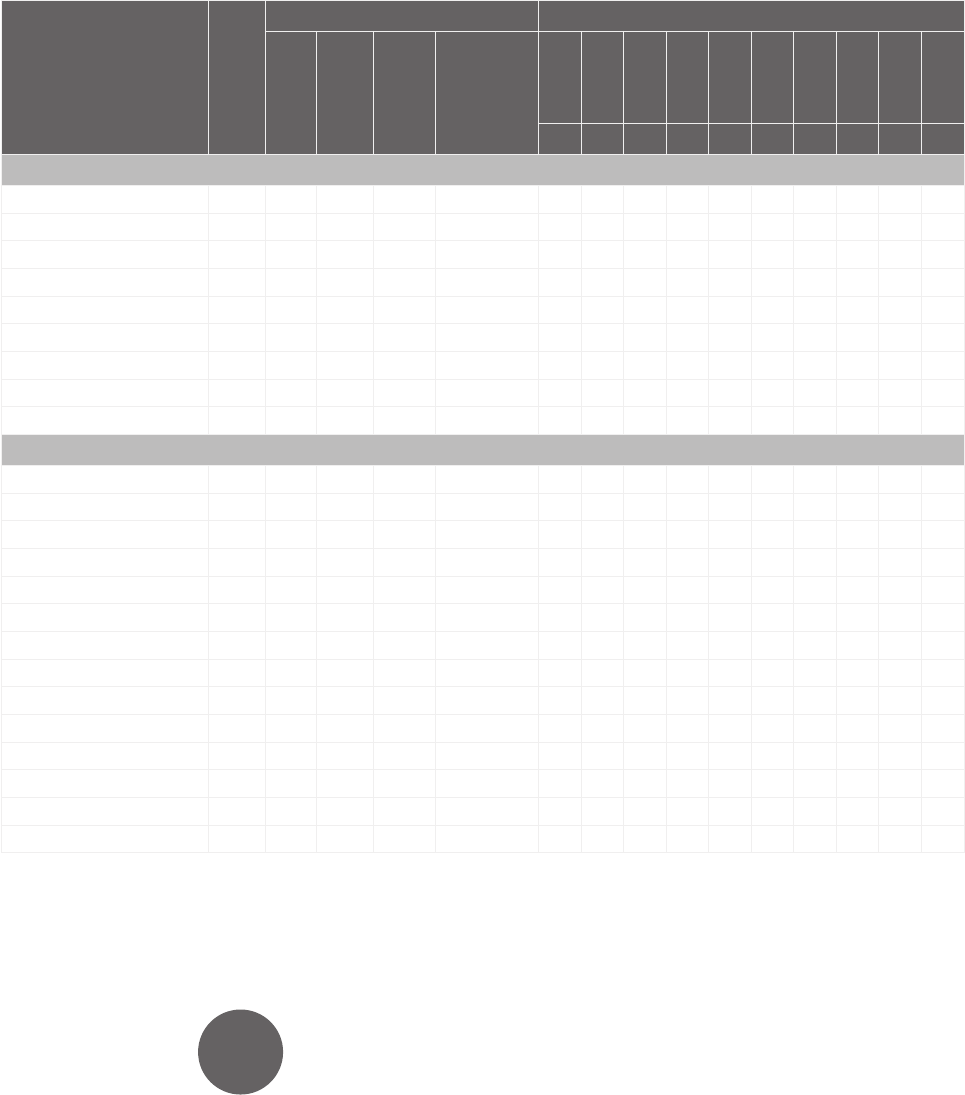
6.1 Control functions
The control functions are bit elds (values) and single bits
(signals) in the I/O table. They are set by a robot and read
by the welding system.
Table 6.1: Control functions in the A7 MIG Welder system
Function Bits
Value range I/O table
Min.
Max.
Step
Units
KEMPPI 1
KEMPPI 2
KEMPPI 3
KEMPPI 4
KEMPPI 5
CUST1
CUST2
CUST3
CUST4
CUST5
1 13 14 15 16 3 5 6 7 9
Control values
WireFeedSpeed 16 5 250 1 0.1 m/min X X X X X X X X X X
Voltage 16 80 460 1 0.1 V X X X X X X X X X X
FineTuning 16 0 180 1 0.1 X X X X X X X X X X
Dynamics 8 0 18 1 1 X X X X X
MemoryChannel 7/8 0 199 1 8 8 8 8 8 8 7 8 8 8
PulseCurrent 16 99 800 A X
PulseBaseCurrent 16 8 500 A X
PulseFrequency 16 10 5000 0.1 Hz X
PulseLength 16 15 500 10 us X
Control signals
WeldingAllowed 1 X X X
SimulationMode 1 X X X X X X X
StartWelding 1 X X X X X X X X X X
WireInch 1 X X X X X X X X X X
WireRetract 1 X X X X X X X X X X
GasBlow 1 X X X X X X X X X X
AirBlow 1 X X X X X X X X
TouchSensorToolSel 1 X X X X X
TouchSensorOn 1 X X X X X X X X X X
OnlineControl 1 X X X X X X X X X X
Watchdog 1 X X X X X
ErrorReset 1 X X X X X X X
HotStartOn 1 X X
CraterFillOn 1 X X