
Operation Manual










50
A7 MIG Welder© Kemppi Oy 2018 1804
INTEGRATION GUIDE
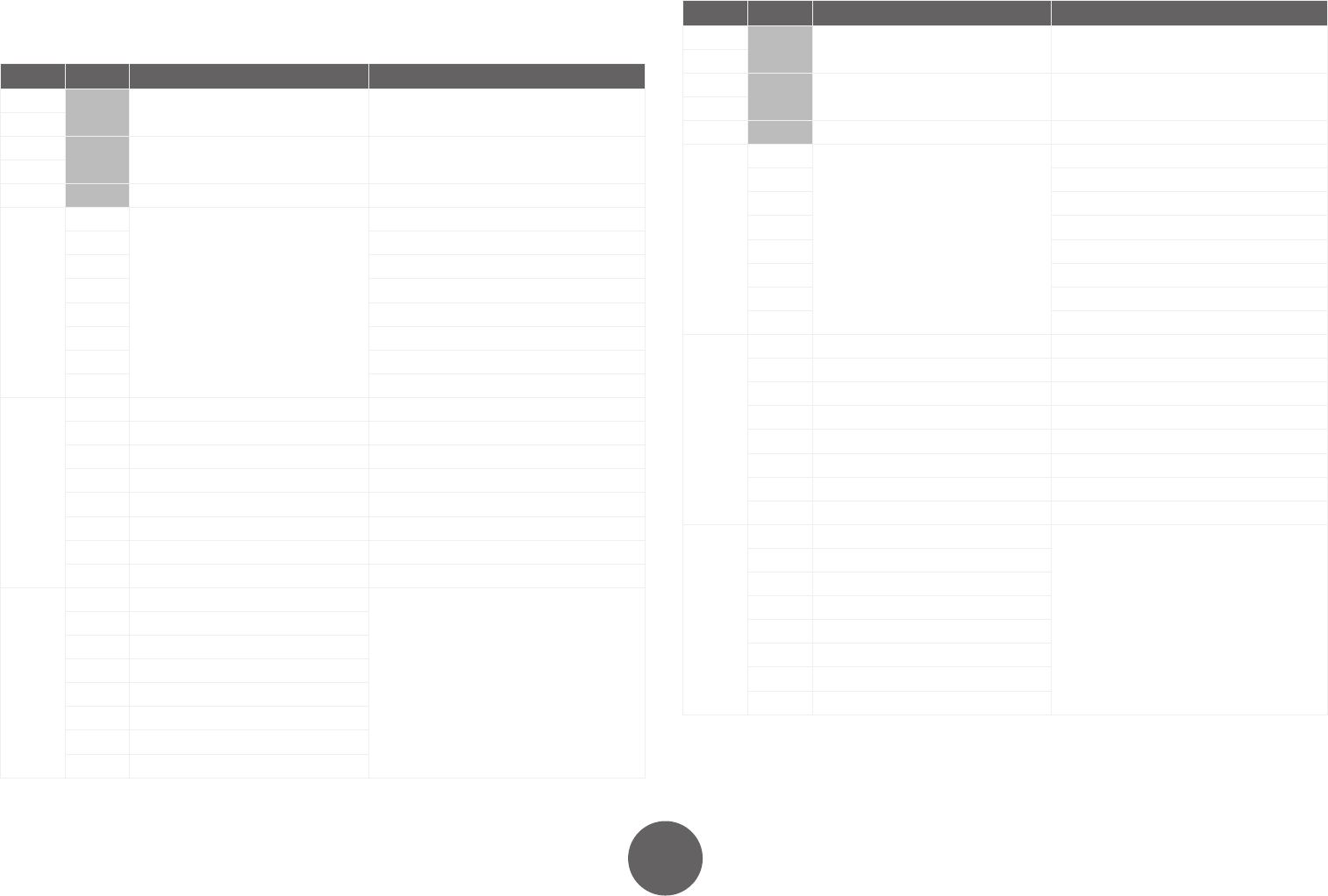
6.3 I/O tables
6.3.1 KEMPPI1: KempArc Pulse default table
Interface mode = 1. Table size = 8 bytes.
Byte Bit Control (Robot -> Welder) Status (Welder -> Robot)
0
WireFeedSpeed WeldingCurrent
1
2
Voltage / FineTuning WeldingVoltage
3
4 MemoryChannel ErrorNumber
5 0
Dynamics
CycleOn
1 ArcOn
2 TouchSensed
3 PowerSourceReady
4 Error
5 Ready
6 LocalRemote
7 AutoManual
6 0 StartWelding DigitalInput1
1 SimulationMode DigitalInput2
2 WireInch DigitalInput3
3 WireRetract DigitalInput4
4 GasBlow GateDoorOpen
5 TouchSensorToolSel DigitalInput6
6 TouchSensorOn CollisionDetected
7 OnlineControl GasFlowOk
7 0 Watchdog
WeldingWireFeedSpeed
1 ErrorReset
2 AirBlow
3 (Not in use)
4 (Not in use)
5 DigitalOutput1
6 DigitalOutput2
7 DigitalOutput3
6.3.2 KEMPPI2: KempArc Pulse customized table
Interface mode = 13. Table size = 8 bytes.
Byte Bit Control (Robot -> Welder) Status (Welder -> Robot)
0
WireFeedSpeed WeldingCurrent
1
2
Voltage / FineTuning WeldingVoltage
3
4 MemoryChannel ErrorNumber
5 0
Dynamics
CycleOn
1 ArcOn
2 TouchSensed
3 PowerSourceReady
4 Error
5 Ready
6 LocalRemote
7 AutoManual
6 0 StartWelding GateDoorOpen
1 SimulationMode DigitalInput2
2 WireInch DigitalInput3
3 WireRetract DigitalInput4
4 GasBlow DigitalInput5
5 TouchSensorToolSel DigitalInput6
6 TouchSensorOn CollisionDetected
7 OnlineControl GasFlowOk
7 0 Watchdog
WeldingWireFeedSpeed
1 ErrorReset
2 AirBlow
3 (Not in use)
4 (Not in use)
5 DigitalOutput1
6 DigitalOutput2
7 DigitalOutput3