
Operation Manual










33
A7 MIG Welder© Kemppi Oy 2018 1804
INTEGRATION GUIDE
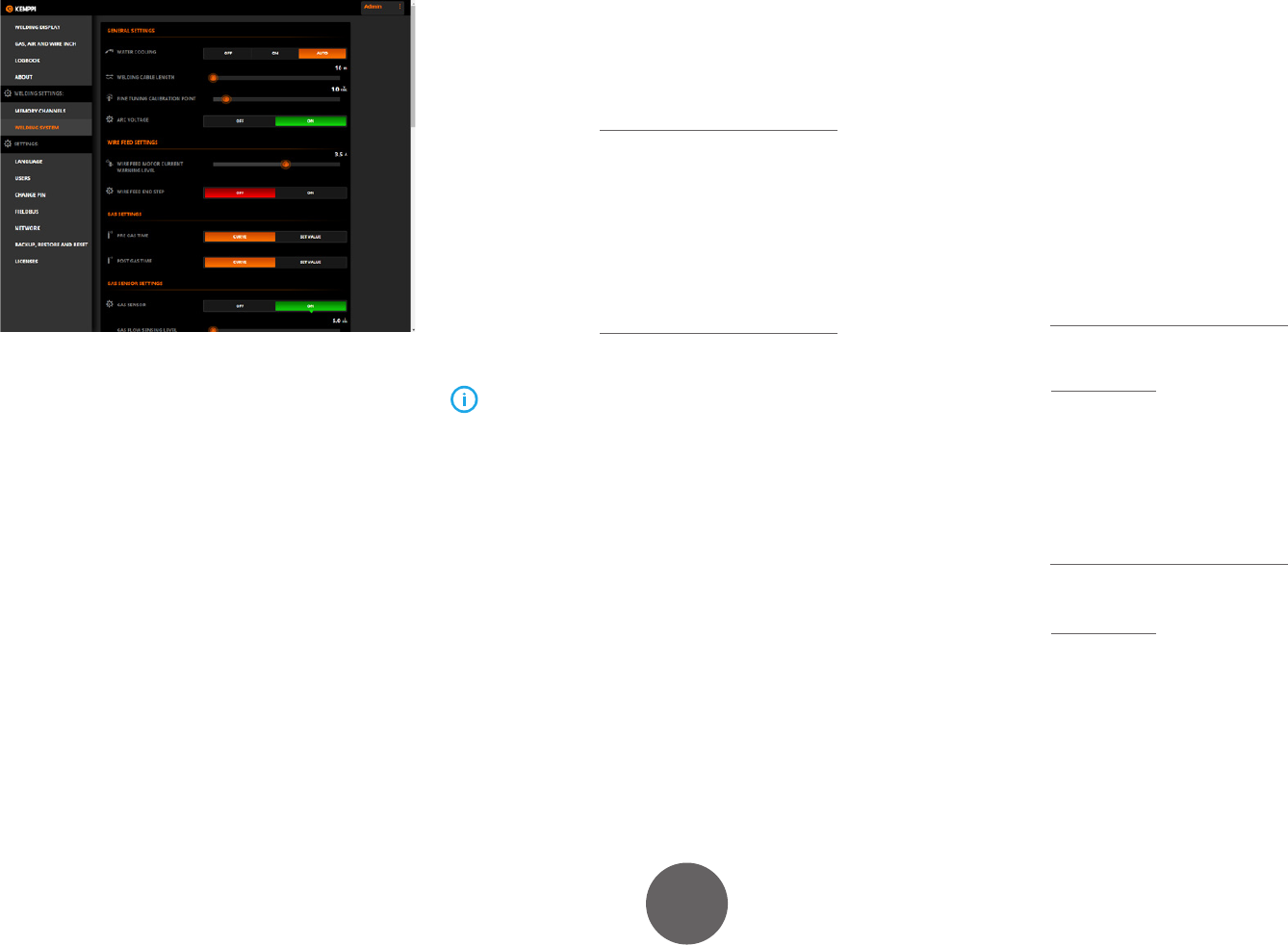
• For the WireFeedSpeed and
WeldingWireFeedSpeed functions, set the desired
value for the Wire feed speed scaling parameter.
• For the Voltage, FineTuning, and WeldingVoltage
functions, set the desired value for the Voltage
scaling parameter.
• For the WeldingCurrent function, set the desired
value for the Current scaling parameter.
Click on the Save button, in the bottom bar, to save the
changes.
Scaling formula
The scaling uses the formula
Value
TARGET
=
ScaleValue × Value
SOURCE
Value
MAX
where Value
MAX
is the maximum value and Value
SOURCE
is the
setup value.
The actual result of the setup value can be calculated by
using an inverted formula:
Value
SOURCE
=
Value
MAX
× Value
TARGET
ScaleValue
The division is performed in the digital robot interface
by using integers multiplied by 10. This results in accuracy of
one decimal digit, thus the calculation loses less signicant
digits and produces nal values which may not exactly
match with the target values.
Example
By means of its specication one robot uses the value
range 0–1023 for adjusting the welding voltage. The
voltage range in the welding system is 8.0–46.0 V. The
operator of the robot wants to use robot’s full value range
to achieve the best accuracy of the voltage control, thus
the voltage scaling value should be congured to be the
maximum value of the robot’s range (1023).
When the operator wants to use the welding voltage of
25 V, the robot control value is calculated thus:
Value
TARGET
=
ScaleValue × Value
SOURCE
Value
MAX
= ≈ 555
1023 × 25.0
46.0
The actual voltage can be calculated by using the inverted
formula:
Value
SOURCE
=
Value
MAX
× Value
TARGET
ScaleValue
= ≈ 24.956
46.0 × 555
1023
Conclusion: The operator uses the control value 555 to
achieve the welding voltage of 25 V. The actual welding
voltage achieved by using this value is 24.9 V (the less
signicant digits are lost).