
Owner's manual










Table Of Contents
- Cover
- Please Read Before Use
- CAUTION
- CE Marking
- Table of Contents
- Safety Guide
- Caution in Handling
- 1. Overview
- 2. Installation
- 3. Wiring
- 3.1 Basic Structure
- 3.2 Configuration Using a SIO Converter
- 3.3 Configuration Using an Isolated PIO Terminal Block
- 3.4 Configuration Using Both SIO Converter and Isolated PIO Terminal Block
- 3.5 Specifications of I/O Signals
- 3.6 I/O Signals for PIO Pattern 1 [3 Points] (Air Cylinder)
- 3.7 I/O Signals for PIO Pattern 0 [8 Points]
- 3.8 I/O Signals for PIO Pattern 2 [16 Points] (Setting by Zone BoundaryParameters)
- 3.9 I/O Signals for PIO Pattern 3 [16 Points] (Setting in Zone Fields in thePosition Table)
- 3.10 Emergency-Stop Circuit
- 3.11 Extension Cable
- 4. Electrical Specifications
- 5. Data Entry
- 6. Operation in the “3 Points (Air Cylinder)” Mode
- 7. Operation in the “8 Points” and “16 Points” Modes
- 7.1 How to Start
- 7.2 Position Table and Parameter Settings Required for Operation
- 7.3 How to Execute Home Return
- 7.4 Home Return and Movement after Start (16 Points)
- 7.5 Positioning Mode (Back and Forth Movement between Two Points)
- 7.6 Push & Hold Mode
- 7.7 Speed Change during Movement
- 7.8 Operation at Different Acceleration and Deceleration Settings
- 7.9 Pause
- 7.10 Zone Signal
- 7.11 Incremental Moves
- 7.12 Notes on Incremental Mode
- 8. Parameter Settings
- 9. Troubleshooting
- 10. Maintenance and Inspection
- 11. Appendix
- Change History
127
7. Operation in the “8 Points” and “16 Points” Modes <Practical Operation>
118
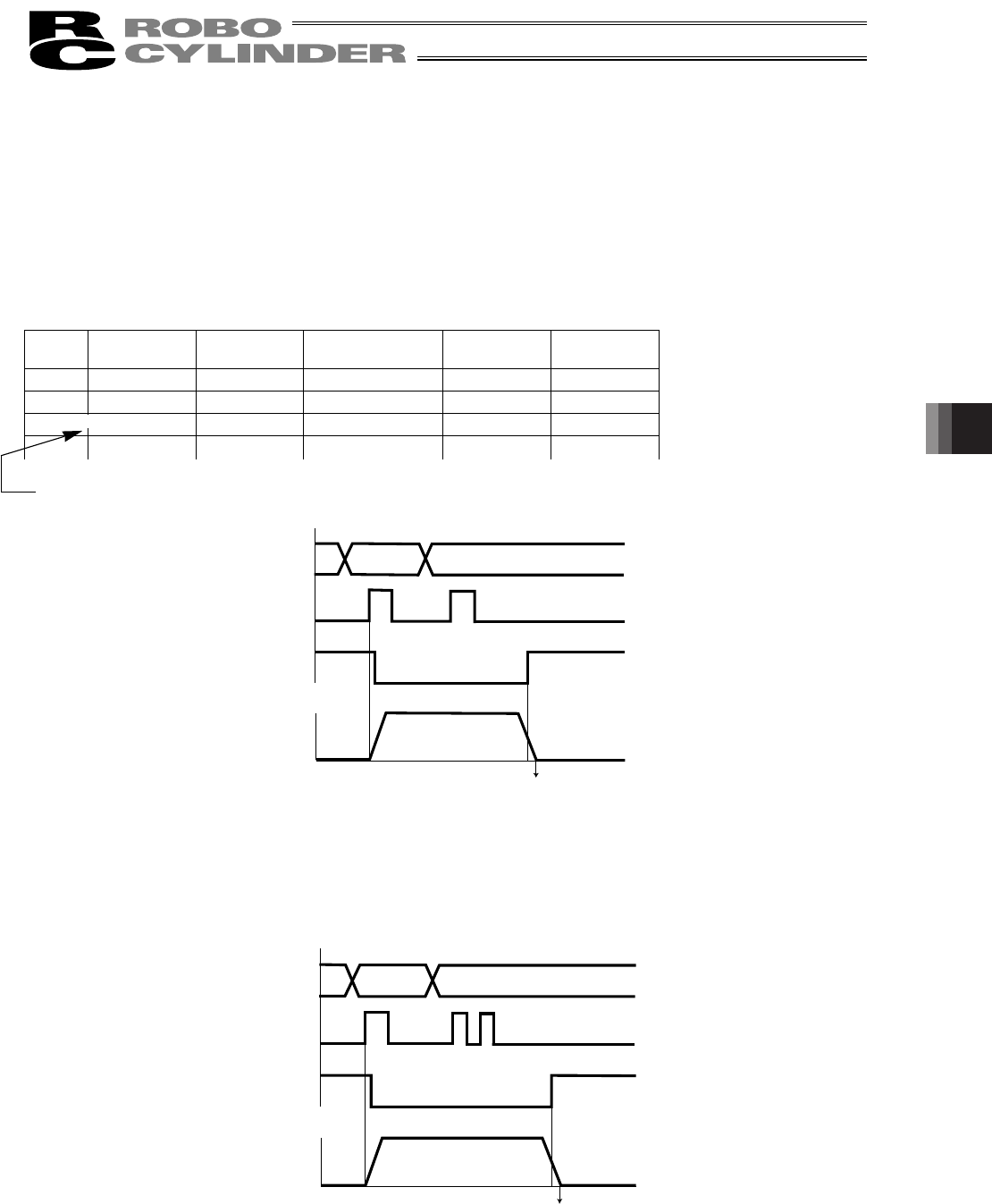
Command position
Start
Position complete
Actuator movement
Position 1 Position 2
Distance
Position from home: 215 mm
Speed
Position from home: 230 mm
Distance
Command position
Start
Position complete
Actuator movement
Position 1 Position 2
Speed
7.12 Notes on Incremental Mode
(1) Positioning mode
Selecting/entering a position number in the incremental mode during positioning will cause the actuator to move
to the position corresponding to the initial position plus the increment.
(If the increment is a negative value, the actuator will move to the position corresponding to the initial position
minus the increment.)
Example) If the start signal for movement to position 2 is input while the actuator is moving to position 1, the
actuator will move to the position 215 mm from the home.
Position-data table (Field(s) within thick line must be entered.)
No.
Position
[mm]
Speed
[mm/s]
Positioning band
[mm]
Push & hold
[%]
Incremental
0 * * * * *
1 200.00 100.00 0.10
0 0
2
15.00 20.00 0.
10
0
1
x
x
x
Incremental moves
If the start signal for movement to an incremental position number is input multiple times during positioning, the
actuator will move to the position corresponding to the initial position plus the “increment x number of times the
signal was input.”
Example) If the start signal for movement to position 2 is input twice while the actuator is moving to position
1, the actuator will move to the position 230 mm from the home.
* On the teaching pendant screen, this sign indicates that
the position is specified in the incremental mode.
=