
User manual










Table Of Contents
- Programmier-Handbuch mx-16 HoTT
- Inhaltsverzeichnis
- Warn- und Hinweissymbole sowie deren Bedeutung
- Hinweise zum Umweltschutz
- Sicherheitshinweise
- Sicherheitshinweise und Behandlungsvorschriften für Nickel-Metall-Hydrid Akkumulatoren
- Einleitung
- Betriebshinweise
- Senderbeschreibung
- Inbetriebnahme des Senders
- Inbetriebnahme des Empfängers
- Installationshinweise
- Digitale Trimmung
- Begriffsdefinitionen
- Schalter- und Geberschalterzuordnung
- "Binden" von Sender und Empfänger
- Was ist ein Mischer?
- Allgemeine Anmerkungen zu frei programmierbaren Mixern
- Flächenmodelle
- Empfängerbelegung
- Bindungs Typ
- „Binden“ von Sender und Empfänger
- Programmbeschreibung im Detail
- Neuen Speicherplatz belegen
- Modellspeicher
- Grundeinstellung
- Servoeinstellung
- Gebereinstellung
- D/R Expo
- Phasentrim
- Flächenmix
- Mischerneutralpunkte
- QR - Diff. (Querruderdifferenzierung)
- WK - Diff. (Wölbklappendifferenzierung)
- QR => SR (Querruder => Seitenruder)
- QR => WK (Querruder => Wölbklappe)
- Bremse => HR (Bremse => Höhenruder)
- Bremse => WK (Bremse => Wölbklappe)
- Bremse => QR (Bremse => Querruder)
- Kombination der Mischer Bremse => N.N.*: „Krähenstellung“ oder „Butterfly“
- HR => WK (Höhenruder => Wölbklappe)
- HR QR (Höhenruder Querruder)
- WK => HR (Wölbklappe => Höhenruder)
- WK => QR (Wölbklappe => Querruder)
- Diff.-Red. (Differenzierungsreduktion)
- Freie Mixer
- Servoanzeige
- Allgemeine Einstellungen
- Fail Safe
- Telemetrie
- Lehrer/Schüler
- Info-Anzeige
- Programmierbeispiele
- Vorbereitende Maßnahmen am Beispiel eines Flächenmodells
- Erste Schritte bei der Programmierung eines neuen Modells
- Einbindung eines Elektroantriebs in die Modellprogrammierung
- Betätigung des E-Motors und Butterfly mit K1-Steuerknüppel
- Uhren-Betätigung durch K1-Steuerknüppel oder Schalter SW 1 9
- Verwenden von Flugphasen
- Parallel laufende Servos
- Delta- und Nurflügelmodelle
- F3A-Modell
- Hubschraubermodelle
- Empfängerbelegung
- Bindungs Typ
- „Binden“ von Sender und Empfänger
- Programmbeschreibung im Detail
- Neuen Speicherplatz belegen
- Modellspeicher
- Grundeinstellung
- Servoeinstellung
- Gebereinstellung
- D/R Expo
- Helimix
- Freie Mixer
- TS-Mixer
- Servoanzeige
- Allgemeine Einstellungen
- Fail Safe
- Telemetrie
- Lehrer/Schüler
- Info-Anzeige
- mx-16 HoTT Programmierbeispiele
- Anhang
- Konformitätserklärung
- Garantieurkunde
187
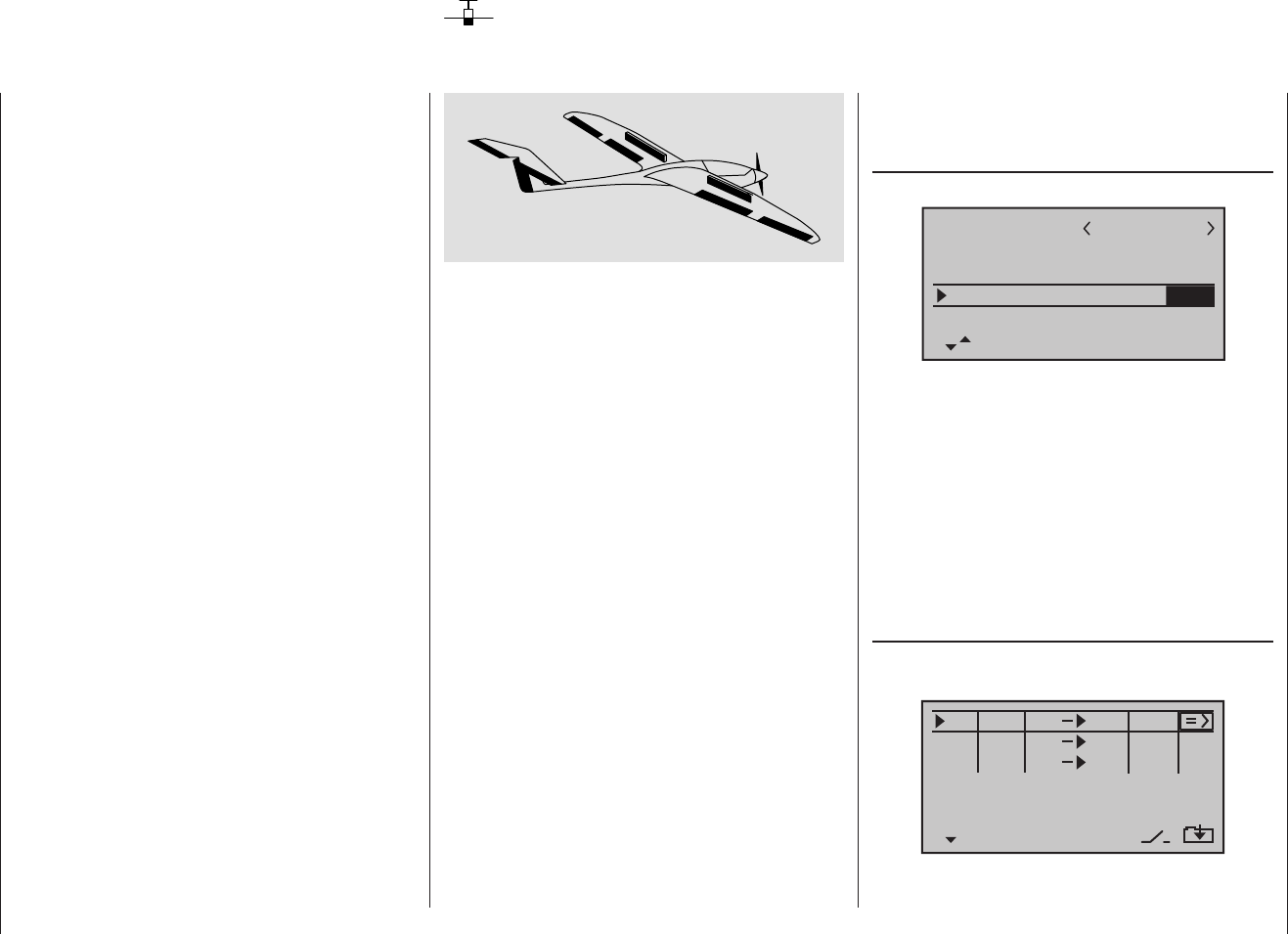
Programmierbeispiel: Flächenmodelle
Einbindung eines Elektroantriebs in die
Modellprogrammierung
Ein Elektroantrieb kann auf verschiedene Arten geregelt
werden:
Die einfachste Methode, einen solchen Antrieb in eine
Modellprogrammierung einzubinden, besteht in der
Verwendung des Gas-/Bremsknüppels (K1). Da dieser
aber im Zuge der vorstehend beschriebenen Modellpro-
grammierung bereits für das Bremssystem vorgesehen
ist, bietet sich entweder die ab Seite 190 beschriebene
umschaltbare Lösung oder eben die Verwendung eines
alternativen Gebers an. Als solcher eignet sich einer der
beiden 3-Stufenschalter SW 4/5 oder 6/7 eher besser,
weil einfacher bedienbar, als einer der Proportional-
Drehgeber CTRL 6 … 8. Alternativ wäre aber auch einer
der 2-Stufen-Schalter verwendbar. Prinzipiell aber sollte
das ausgewählte Bedienelement für Sie gut erreich- und
bedienbar sein.
Bevor wir uns nun aber den einzelnen Beispielen
zuwenden, ist unbedingt noch darauf hinzuweisen, dass
die mit dem Wechsel zwischen Flugphasen verbundene
„Umschaltverzögerung“ sich auch auf parallel ausgelö-
ste Schaltvorgänge auswirkt, beispielsweise Motor EIN/
AUS.
Da aber möglicherweise der Antrieb unabhängig von
dieser ca. 1 s andauernden Umschaltverzögerung ein-
oder – speziell im Notfall – auszuschalten sein soll, emp-
fiehlt es sich ggf. von der im Menü »Grundeinstellung«
vorhandenen Option „K8 verzögert ja/nein“ Gebrauch zu
machen. Schließen Sie in diesem Fall Ihren Motorsteller
an Empfängerausgang 8 an und stellen Sie im Menü …
»Grundeinstellung« (Seite 77)
… die Option „K8 verzögert“ auf „nein“:
Mod.Name
Steueranord
Leitwerk
1
GRAUBELE
Motor an K1
normal
kein
K8 verzögert
nein
Eine, den nachfolgenden Beispielen 1 … 4 ebenfalls ge-
meinsame Option, nämlich das ggf. nötige automatische
Nachführen der Höhenrudertrimmung im Kraftflug, sei
ebenfalls gleich zu Beginn dieses Abschnittes erwähnt:
Stellt sich nämlich nach den ersten Kraftflügen heraus,
dass das Modell bei eingeschaltetem Motor ständig mit
dem Höhenruder korrigiert werden muss, kann durch
Setzen eines freien Mischers und dessen passender
Justierung dieser Umstand abgestellt werden. Dazu
wechseln Sie in das Menü …
»Freie Mischer« (ab Seite 135)
… und programmieren einen der Mischer M1 … 3 vom
„den Motor steuernden Kanal” nach „HR”, z. B.:
von
zu
M1
M2
M3
??
??
8
??
HR
?? –––
–––
–––
Auf dessen zweiter Bildschirmseite wird dann der benö-
tigte – meist geringe – Korrekturwert eingetragen:
Mit Dual Rate wird das Verhältnis von Knüppelweg zu
Steuerweg eingestellt, siehe Seite 108. Sind dagegen
die Maximalausschläge in Ordnung, lediglich die Reakti-
onen um die Mittelstellung für feinfühligeres Steuern zu
giftig, dann tritt – zusätzlich – die „Exponential“-Funktion
in Aktion. Wird auch ein Schalter zugewiesen, kann
während des Fluges sogar zwischen 2 Dual-Rate-/Expo-
Einstellungen umgeschaltet werden.