
User manual










Table Of Contents
- Programmier-Handbuch mx-16 HoTT
- Inhaltsverzeichnis
- Warn- und Hinweissymbole sowie deren Bedeutung
- Hinweise zum Umweltschutz
- Sicherheitshinweise
- Sicherheitshinweise und Behandlungsvorschriften für Nickel-Metall-Hydrid Akkumulatoren
- Einleitung
- Betriebshinweise
- Senderbeschreibung
- Inbetriebnahme des Senders
- Inbetriebnahme des Empfängers
- Installationshinweise
- Digitale Trimmung
- Begriffsdefinitionen
- Schalter- und Geberschalterzuordnung
- "Binden" von Sender und Empfänger
- Was ist ein Mischer?
- Allgemeine Anmerkungen zu frei programmierbaren Mixern
- Flächenmodelle
- Empfängerbelegung
- Bindungs Typ
- „Binden“ von Sender und Empfänger
- Programmbeschreibung im Detail
- Neuen Speicherplatz belegen
- Modellspeicher
- Grundeinstellung
- Servoeinstellung
- Gebereinstellung
- D/R Expo
- Phasentrim
- Flächenmix
- Mischerneutralpunkte
- QR - Diff. (Querruderdifferenzierung)
- WK - Diff. (Wölbklappendifferenzierung)
- QR => SR (Querruder => Seitenruder)
- QR => WK (Querruder => Wölbklappe)
- Bremse => HR (Bremse => Höhenruder)
- Bremse => WK (Bremse => Wölbklappe)
- Bremse => QR (Bremse => Querruder)
- Kombination der Mischer Bremse => N.N.*: „Krähenstellung“ oder „Butterfly“
- HR => WK (Höhenruder => Wölbklappe)
- HR QR (Höhenruder Querruder)
- WK => HR (Wölbklappe => Höhenruder)
- WK => QR (Wölbklappe => Querruder)
- Diff.-Red. (Differenzierungsreduktion)
- Freie Mixer
- Servoanzeige
- Allgemeine Einstellungen
- Fail Safe
- Telemetrie
- Lehrer/Schüler
- Info-Anzeige
- Programmierbeispiele
- Vorbereitende Maßnahmen am Beispiel eines Flächenmodells
- Erste Schritte bei der Programmierung eines neuen Modells
- Einbindung eines Elektroantriebs in die Modellprogrammierung
- Betätigung des E-Motors und Butterfly mit K1-Steuerknüppel
- Uhren-Betätigung durch K1-Steuerknüppel oder Schalter SW 1 9
- Verwenden von Flugphasen
- Parallel laufende Servos
- Delta- und Nurflügelmodelle
- F3A-Modell
- Hubschraubermodelle
- Empfängerbelegung
- Bindungs Typ
- „Binden“ von Sender und Empfänger
- Programmbeschreibung im Detail
- Neuen Speicherplatz belegen
- Modellspeicher
- Grundeinstellung
- Servoeinstellung
- Gebereinstellung
- D/R Expo
- Helimix
- Freie Mixer
- TS-Mixer
- Servoanzeige
- Allgemeine Einstellungen
- Fail Safe
- Telemetrie
- Lehrer/Schüler
- Info-Anzeige
- mx-16 HoTT Programmierbeispiele
- Anhang
- Konformitätserklärung
- Garantieurkunde
163
Programmbeschreibung: Telemetrie
Jeder Empfänger sollte mit einer eigenen Zuleitung
aus der gemeinsamen Spannungsversorgung ange-
schlossen werden. Bei Empfängern mit hoher Strom-
belastung kann es sogar sinnvoll sein, diese mit zwei
Zuleitungen an die gemeinsame Stromversorgung
anzuschließen.
rot
1
2
3
Soll dagegen jeder der beiden Empfänger aus einer
eigenen Spannungsquelle
versorgt werden, dann ist un-
bedingt das mittlere Kabel
aus einem der beiden Ste-
cker des Satellitenkabels zu
entfernen, siehe Abbildung.
Falls Sie weitere Programmierungen wie z. B. Fail-Sa-
fe-Einstellungen vornehmen möchten, trennen Sie
die dreipolige Satelliten-Verbindung zwischen den
beiden Empfängern und schalten Sie nur den be-
treffenden Empfänger ein. Ggf. müssen Sie auch die
Bindungs-Reihenfolge ändern.
• SUMD (digitales Summensignal)
Ein wie zuvor beschrieben als SUMD konfigurierter
HoTT-Empfänger generiert permanent aus den Steu-
ersignalen einer wählbaren Anzahl seiner Steuer-
kanäle ein digitales Summensignal und stellt dieses
bei den Empfängern GR-16 und GR-24 am Servoan-
schluss 8 bereit.
Ein solches Signal wird zum Zeitpunkt der Überar-
beitung dieser Anleitung von einigen der neuesten
elektronischen Entwicklungen im Bereich von Fly-
barless-Systemen, Power-Stromversorgungen usw.
genutzt.
Beachten Sie in diesem Zusammen-
hang aber unbedingt die dem jeweils
angeschlossenen Gerät beiliegenden
Einstellhinweise, da Sie ansonsten riskieren,
dass Ihr Modell ggf. unfliegbar wird.
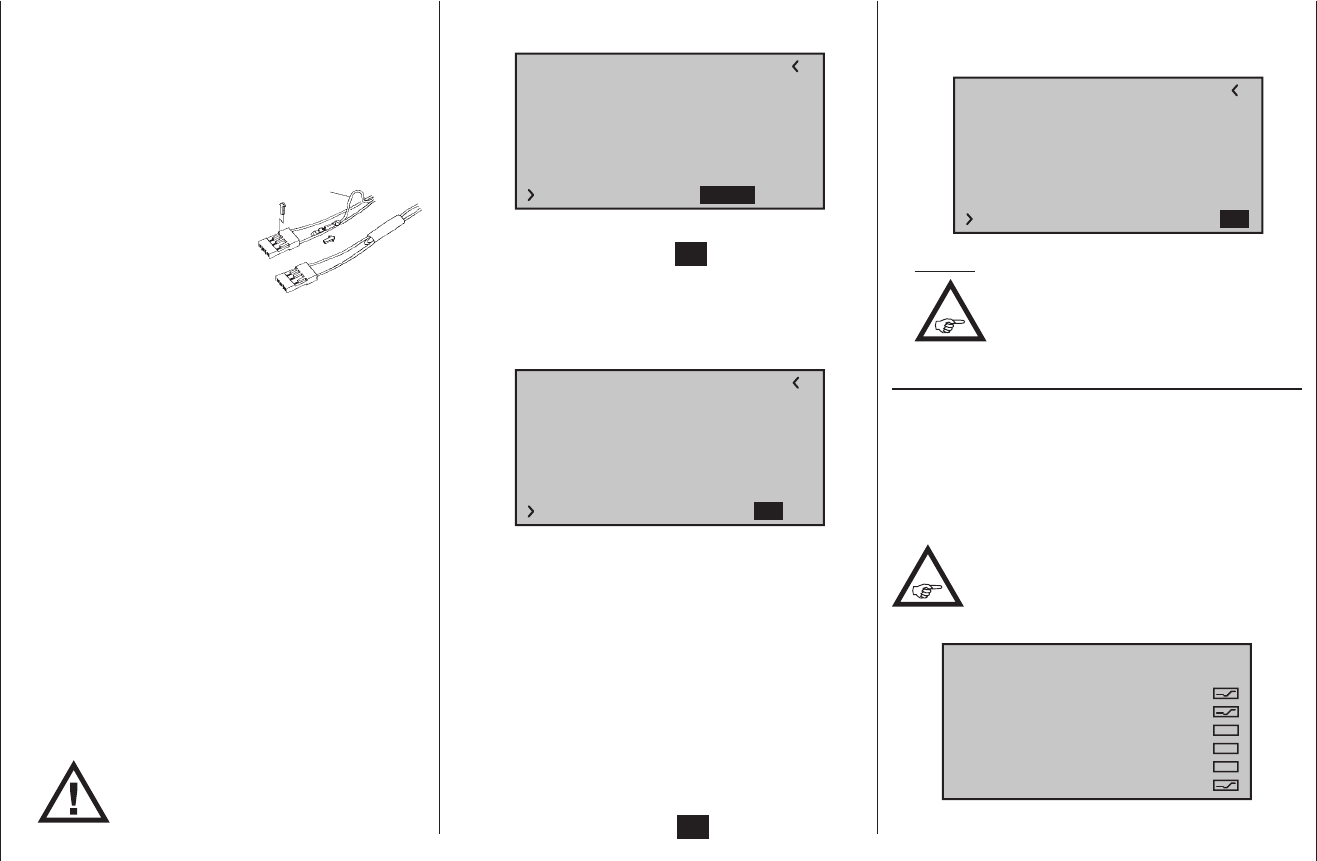
RX SERVO TESTV6.37
ALL–MIN : 1000µsec
ALL–MAX : 2000µsec
ALARM VOLT : 3.8V
ALARM TEMP–:–10°C
ALARM TEMP+: 55°C
TEST : START
CH OUT TYPE:SUMDHD12
Nach der Bestätigung von „SUMD“ durch kur-
zes Antippen der zentralen SET-Taste der rech-
ten Touch-Taste wechselt das aktive Wertefeld nach
rechts, zur Wahl einer der drei möglichen Reaktio-
nen des Empfängers im Falle eines Empfangsaus-
falls (Fail-Safe-Fall):
RX SERVO TESTV6.37
ALL–MIN : 1000µsec
ALL–MAX : 2000µsec
ALARM VOLT : 3.8V
ALARM TEMP–:–10°C
ALARM TEMP+: 55°C
TEST : START
CH OUT TYPE:SUMDHD12
• HD („hold“)
Es werden die zuletzt als korrekt erkannten Sig-
nale am Ausgang „gehalten“ (hold).
• FS (Fail Safe)
Es werden die Daten zuvor abgespeicherter
Fail-Safe-Positionen am Ausgang bereitgestellt,
siehe Abschnitt »Fail Safe« auf Seite 148.
• OF (OFF)
Für die Dauer einer Empfangsstörung werden kei-
ne Signale bereitgestellt.
Zuletzt wechselt das aktive Feld nach erneu-
tem Antippen der zentralen SET-Taste der rechten
Touch-Taste zur Kanalwahl. Mit dieser Wahl bestim-
men Sie den höchsten der im SUMD-Signal enthalte-
nen Senderkanäle:
RX SERVO TESTV6.37
ALL–MIN : 1000µsec
ALL–MAX : 2000µsec
ALARM VOLT : 3.8V
ALARM TEMP–:–10°C
ALARM TEMP+: 55°C
TEST : START
CH OUT TYPE:SUMDHD12
Hinweis:
Im Normalfall wird ein Wert höher als „12“
von den potentiell anschließbaren
Geräten nicht benötigt.
Einstellen, Anzeigen Sensor(en)
Falls an einem Empfänger ein Sensor oder mehrere
Sensoren angeschlossen sind und zu diesem Empfän-
ger eine Telemetrie-Verbindung besteht, können Sie
im Anschluss an das zuvor beschriebene Display „RX
SERVO TEST“ die Displays eines beliebigen Sensors
aufrufen und ggf. auch dessen Einstellungen ändern.
Sender vom Typ mx-16 HoTT mit Firmwa-
reversion V1.730 oder höher erkennen einen
am Empfänger angeschlossenen Sensor
bzw. angeschlossene Sensoren automatisch:
SENSOR
EMPFÄNGER
GENERAL MODUL
VARIO MODUL
ELECTR. AIR-MODUL
GPS
ESC