
User manual










Table Of Contents
- Programmier-Handbuch mx-16 HoTT
- Inhaltsverzeichnis
- Warn- und Hinweissymbole sowie deren Bedeutung
- Hinweise zum Umweltschutz
- Sicherheitshinweise
- Sicherheitshinweise und Behandlungsvorschriften für Nickel-Metall-Hydrid Akkumulatoren
- Einleitung
- Betriebshinweise
- Senderbeschreibung
- Inbetriebnahme des Senders
- Inbetriebnahme des Empfängers
- Installationshinweise
- Digitale Trimmung
- Begriffsdefinitionen
- Schalter- und Geberschalterzuordnung
- "Binden" von Sender und Empfänger
- Was ist ein Mischer?
- Allgemeine Anmerkungen zu frei programmierbaren Mixern
- Flächenmodelle
- Empfängerbelegung
- Bindungs Typ
- „Binden“ von Sender und Empfänger
- Programmbeschreibung im Detail
- Neuen Speicherplatz belegen
- Modellspeicher
- Grundeinstellung
- Servoeinstellung
- Gebereinstellung
- D/R Expo
- Phasentrim
- Flächenmix
- Mischerneutralpunkte
- QR - Diff. (Querruderdifferenzierung)
- WK - Diff. (Wölbklappendifferenzierung)
- QR => SR (Querruder => Seitenruder)
- QR => WK (Querruder => Wölbklappe)
- Bremse => HR (Bremse => Höhenruder)
- Bremse => WK (Bremse => Wölbklappe)
- Bremse => QR (Bremse => Querruder)
- Kombination der Mischer Bremse => N.N.*: „Krähenstellung“ oder „Butterfly“
- HR => WK (Höhenruder => Wölbklappe)
- HR QR (Höhenruder Querruder)
- WK => HR (Wölbklappe => Höhenruder)
- WK => QR (Wölbklappe => Querruder)
- Diff.-Red. (Differenzierungsreduktion)
- Freie Mixer
- Servoanzeige
- Allgemeine Einstellungen
- Fail Safe
- Telemetrie
- Lehrer/Schüler
- Info-Anzeige
- Programmierbeispiele
- Vorbereitende Maßnahmen am Beispiel eines Flächenmodells
- Erste Schritte bei der Programmierung eines neuen Modells
- Einbindung eines Elektroantriebs in die Modellprogrammierung
- Betätigung des E-Motors und Butterfly mit K1-Steuerknüppel
- Uhren-Betätigung durch K1-Steuerknüppel oder Schalter SW 1 9
- Verwenden von Flugphasen
- Parallel laufende Servos
- Delta- und Nurflügelmodelle
- F3A-Modell
- Hubschraubermodelle
- Empfängerbelegung
- Bindungs Typ
- „Binden“ von Sender und Empfänger
- Programmbeschreibung im Detail
- Neuen Speicherplatz belegen
- Modellspeicher
- Grundeinstellung
- Servoeinstellung
- Gebereinstellung
- D/R Expo
- Helimix
- Freie Mixer
- TS-Mixer
- Servoanzeige
- Allgemeine Einstellungen
- Fail Safe
- Telemetrie
- Lehrer/Schüler
- Info-Anzeige
- mx-16 HoTT Programmierbeispiele
- Anhang
- Konformitätserklärung
- Garantieurkunde
161
Programmbeschreibung: Telemetrie
Alarmgrenze erfolgt ein akustisches Signal (Interva-
ll-Piepton lang/kurz) und in allen „RX …“-Displays blinkt
rechts oben „VOLT.E“:
RX SERVO
REVERSE : OFF
CENTER : 1500µsec
TRIM : –000µsec
TRAVEL– : 150%
OUTPUT CH: 01
TRAVEL+ : 150%
PERIOD : 20msec
VOLT.E
Im Display „RX DATAVIEW“ wird außerdem der Parame-
ter „R-VOLT“ invers dargestellt:
S–STR100% R–TEM.+28°C
L PACK TIME 00010msec
L.R-VOLT:03.5V
S–QUA100%S–dBM–030dBM
SENSOR1 :00.0V 00°C
SENSOR2 :00.0V 00°C
R-VOLT :03.7V
RX DATAVIEW VOLT.E
ALARM TEMP +/- (Empf.-Temperaturüberwachung)
Diese beiden Optionen überwachen die Empfänger-
temperatur. Ein unterer Grenzwert „ALARM TEMP-“
(-20 … +10 °C) und ein oberer Grenzwert „ALARM
TEMP+“ (+50 … +80 °C) können programmiert werden.
Bei Unter- oder Überschreitung dieser Vorgaben ertönt
ein akustisches Signal (Dauer Piepton) und in allen
Empfänger-Displays erscheint oben rechts „TEMP.E“.
Auf der Displayseite „RX DATAVIEW“ wird außerdem der
Parameter „R-TEM“ invers dargestellt.
Vergewissern Sie sich, dass Sie unter allen Betriebs-
bedingungen im Rahmen der erlaubten Temperaturen
Ihres Empfängers bleiben (idealerweise zwischen -10
und +55 °C).
CH OUTPUT TYPE (Anschlusstyp)
In dieser Zeile wählen Sie die Art der Servoansteuerung
oder alternativ den Signaltyp des Summensignalaus-
ganges aus:
• ONCE
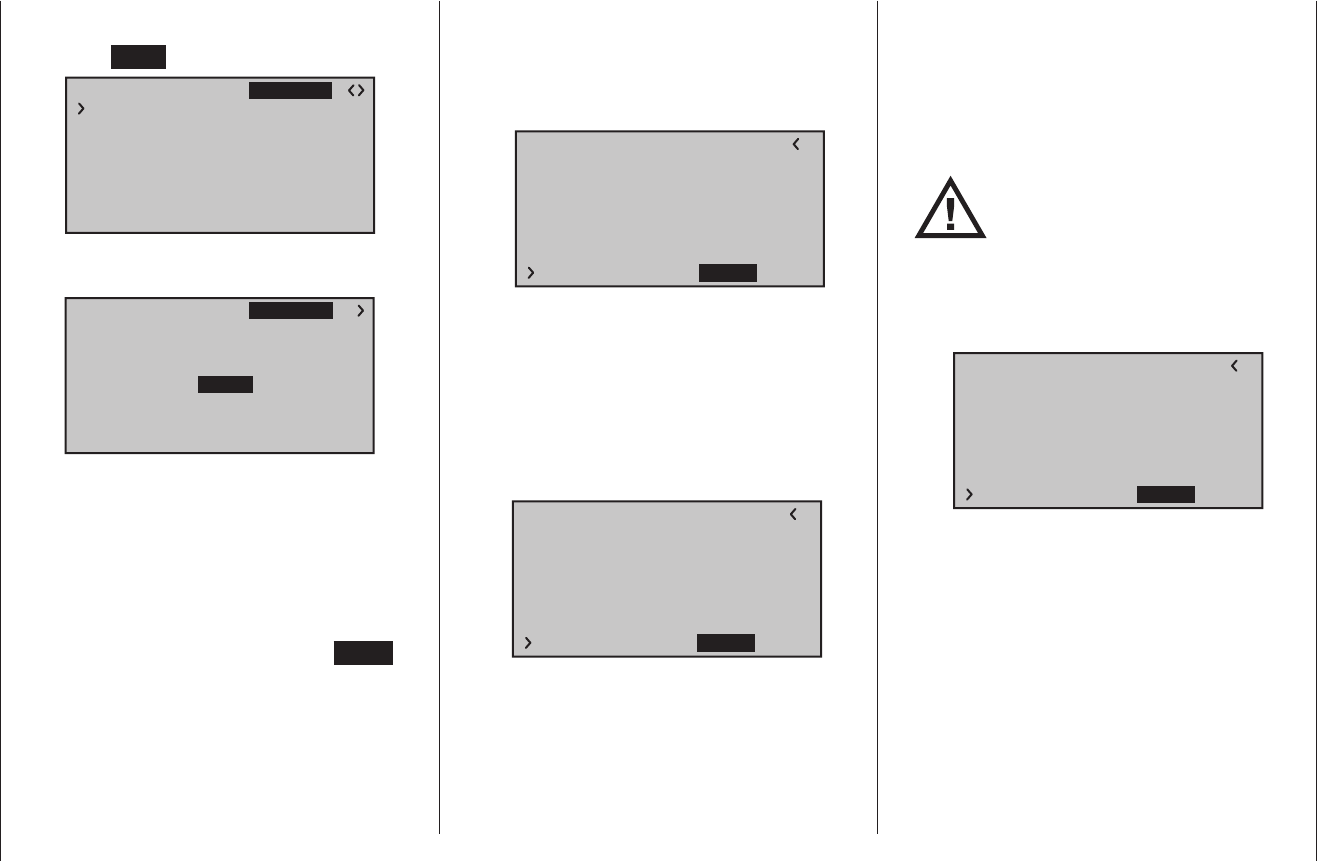
RX SERVO TESTV6.37
ALL–MIN : 1000µsec
ALL–MAX : 2000µsec
ALARM VOLT : 3.8V
ALARM TEMP–:–10°C
ALARM TEMP+: 55°C
TEST : START
CH OUT TYPE:ONCE
Die Servoanschlüsse des Empfängers werden nach-
einander angesteuert. Empfohlen für Analogservos.
Bei dieser Einstellung werden die Servos auto-
matisch in einem Zyklus von 20 ms – beim 12-Ka-
nal-Empfänger GR-24 (Best.-Nr. 33512) 30 ms – be-
trieben, egal was im Display „RX SERVO“ in der
Zeile „PERIOD“ eingestellt bzw. angezeigt wird!
• SAME
RX SERVO TESTV6.37
ALL–MIN : 1000µsec
ALL–MAX : 2000µsec
ALARM VOLT : 3.8V
ALARM TEMP–:–10°C
ALARM TEMP+: 55°C
TEST : START
CH OUT TYPE:SAME
Die Servoanschlüsse des Empfängers werden in Vie-
rerblöcken parallel angesteuert. D. h., beim im Set
enthaltenen Empfänger GR-16 bekommen die Ka-
näle 1 bis 4 sowie 5 bis 8 die Steuersignale jeweils
gleichzeitig.
Empfohlen bei Digitalservos, wenn mehrere Servos
für eine Funktion eingesetzt werden (z. B. Querru-
der), damit die Servos absolut synchron laufen.
Bei ausschließlicher Verwendung von Digitalservos
empfiehlt sich, in der Zeile „PERIOD“ des Displays
„RX SERVO“ „10 ms“ einzustellen, um die schnel-
le Reaktion von Digitalservos nutzen zu können. Bei
Verwendung von Analogservos oder im Mischbetrieb
ist unbedingt „20 ms“ zu wählen!
Achten Sie bei dieser Einstellung be-
sonders auf eine ausreichende Dimen-
sionierung der Empfängerstromver-
sorgung.
Da bei der Wahl von „SAME“ immer bis zu vier Ser-
vos gleichzeitig anlaufen, wird diese stärker belastet.
• SUMO (Summensignal OUT)
RX SERVO TESTV6.37
ALL–MIN : 1000µsec
ALL–MAX : 2000µsec
ALARM VOLT : 3.8V
ALARM TEMP–:–10°C
ALARM TEMP+: 55°C
TEST : START
CH OUT TYPE:SUMO
Ein als SUMO konfigurierter HoTT-Empfänger ge-
neriert permanent aus den Steuersignalen aller sei-
ner Steuerkanäle ein so genanntes Summensignal
und stellt dieses beispielsweise beim standardmäßig
dem Set beiliegenden Empfänger GR-16 (Best.-Nr.
33508) am Servoanschluss 8 bereit.
Bei Empfängern, in deren Display rechts neben
„SUMO“ noch eine zweistellige Zahl erscheint …