
User manual










Table Of Contents
- Programmier-Handbuch mx-16 HoTT
- Inhaltsverzeichnis
- Warn- und Hinweissymbole sowie deren Bedeutung
- Hinweise zum Umweltschutz
- Sicherheitshinweise
- Sicherheitshinweise und Behandlungsvorschriften für Nickel-Metall-Hydrid Akkumulatoren
- Einleitung
- Betriebshinweise
- Senderbeschreibung
- Inbetriebnahme des Senders
- Inbetriebnahme des Empfängers
- Installationshinweise
- Digitale Trimmung
- Begriffsdefinitionen
- Schalter- und Geberschalterzuordnung
- "Binden" von Sender und Empfänger
- Was ist ein Mischer?
- Allgemeine Anmerkungen zu frei programmierbaren Mixern
- Flächenmodelle
- Empfängerbelegung
- Bindungs Typ
- „Binden“ von Sender und Empfänger
- Programmbeschreibung im Detail
- Neuen Speicherplatz belegen
- Modellspeicher
- Grundeinstellung
- Servoeinstellung
- Gebereinstellung
- D/R Expo
- Phasentrim
- Flächenmix
- Mischerneutralpunkte
- QR - Diff. (Querruderdifferenzierung)
- WK - Diff. (Wölbklappendifferenzierung)
- QR => SR (Querruder => Seitenruder)
- QR => WK (Querruder => Wölbklappe)
- Bremse => HR (Bremse => Höhenruder)
- Bremse => WK (Bremse => Wölbklappe)
- Bremse => QR (Bremse => Querruder)
- Kombination der Mischer Bremse => N.N.*: „Krähenstellung“ oder „Butterfly“
- HR => WK (Höhenruder => Wölbklappe)
- HR QR (Höhenruder Querruder)
- WK => HR (Wölbklappe => Höhenruder)
- WK => QR (Wölbklappe => Querruder)
- Diff.-Red. (Differenzierungsreduktion)
- Freie Mixer
- Servoanzeige
- Allgemeine Einstellungen
- Fail Safe
- Telemetrie
- Lehrer/Schüler
- Info-Anzeige
- Programmierbeispiele
- Vorbereitende Maßnahmen am Beispiel eines Flächenmodells
- Erste Schritte bei der Programmierung eines neuen Modells
- Einbindung eines Elektroantriebs in die Modellprogrammierung
- Betätigung des E-Motors und Butterfly mit K1-Steuerknüppel
- Uhren-Betätigung durch K1-Steuerknüppel oder Schalter SW 1 9
- Verwenden von Flugphasen
- Parallel laufende Servos
- Delta- und Nurflügelmodelle
- F3A-Modell
- Hubschraubermodelle
- Empfängerbelegung
- Bindungs Typ
- „Binden“ von Sender und Empfänger
- Programmbeschreibung im Detail
- Neuen Speicherplatz belegen
- Modellspeicher
- Grundeinstellung
- Servoeinstellung
- Gebereinstellung
- D/R Expo
- Helimix
- Freie Mixer
- TS-Mixer
- Servoanzeige
- Allgemeine Einstellungen
- Fail Safe
- Telemetrie
- Lehrer/Schüler
- Info-Anzeige
- mx-16 HoTT Programmierbeispiele
- Anhang
- Konformitätserklärung
- Garantieurkunde
156
Programmbeschreibung: Telemetrie
gen „ab“.
ACHTUNG:
Analogservos und auch so manches Digi-
talservo setzen während des Ausfalls der
Steuerimpulse dem nach wie vor vorhan-
denen Steuerdruck keinen Widerstand mehr entge-
gen und werden infolgedessen mehr oder weniger
schnell aus ihrer Position gedrückt.
F.S.POS. (Fail-Safe-Position)
Für jeden OUTPUT CH (Servoanschluss des Empfän-
gers) stellen Sie in der Zeile „F.S.POS.“ nach Aktivierung
des Wertefeldes (inverse Darstellung) durch Antippen
der zentralen Taste SET der rechten Touch-Taste mit
den Auswahltasten der rechten Touch-Taste diejenige
Servoposition ein, die das Servo im Störfall im Modus
„FAI(L) SAFE“ einnehmen soll. Die Einstellung erfolgt in
10-µs-Schritten.
Werkseinstellung: 1500 µs (Servomitte).
Wichtiger Hinweis:
Die Funktion „F.S.POS.“ hat darüber hinaus
in allen drei Modi „OFF“, „HOLD“ und „FAI(L)
SAFE“ noch eine besondere Bedeutung für
den Fall, dass der Empfänger eingeschaltet wird, aber
(noch) kein gültiges Signal erhält:
Das Servo fährt sofort in die in der Zeile „POSITION“
voreingestellte Fail-Safe-Position. Dadurch können Sie
z. B. verhindern, dass beim versehentlichen Einschalten
des Empfängers bei ausgeschaltetem Sender ein Fahr-
werk einfährt o. ä. Im normalen Modellbetrieb verhält
sich dagegen das entsprechende Servo im Störungsfall
gemäß dem eingestellten „MODE“.
DELAY (Fail-Safe-Reaktionszeit oder Verzögerung)
Stellen Sie hier die Verzögerungszeit ein, nach der die
Servos bei Signalunterbrechung in ihre vorgewählten
Positionen laufen sollen. Diese Einstellung wird für alle
Kanäle übernommen und betrifft nur die auf den Mode
„FAI(L) SAFE“ programmierten Servos.
Werkseinstellung: 0,75 s.
FAIL SAFE ALL (Globale Fail-Safe-Einstellung)
Dieses Untermenü gestattet auf ähnlich einfache Weise
wie das auf Seite 148 beschriebene Menü »Fail Safe«,
die Fail-Safe-Positionen von Servos mit einem „Knopf-
druck“ festzulegen:
Wechseln Sie zur Zeile „FAIL SAFE ALL“ und aktivie-
ren Sie das Wertefeld durch Antippen der zentralen
SET-Taste der rechten Touch-Taste. „NO“ wird invers
dargestellt. Stellen Sie anschließend den Parameter mit
einer der Auswahltasten der rechten Touch-Taste auf
„SAVE“.
Bringen Sie nun mit den Bedienelementen des Senders
alle Servos, denen Sie in der Zeile „MODE“ „FAI(L)
SAFE“ zugeordnet haben oder später zuordnen wollen,
GLEICHZEITIG in die jeweils gewünschte Fail-Safe-Po-
sition und halten Sie diese.
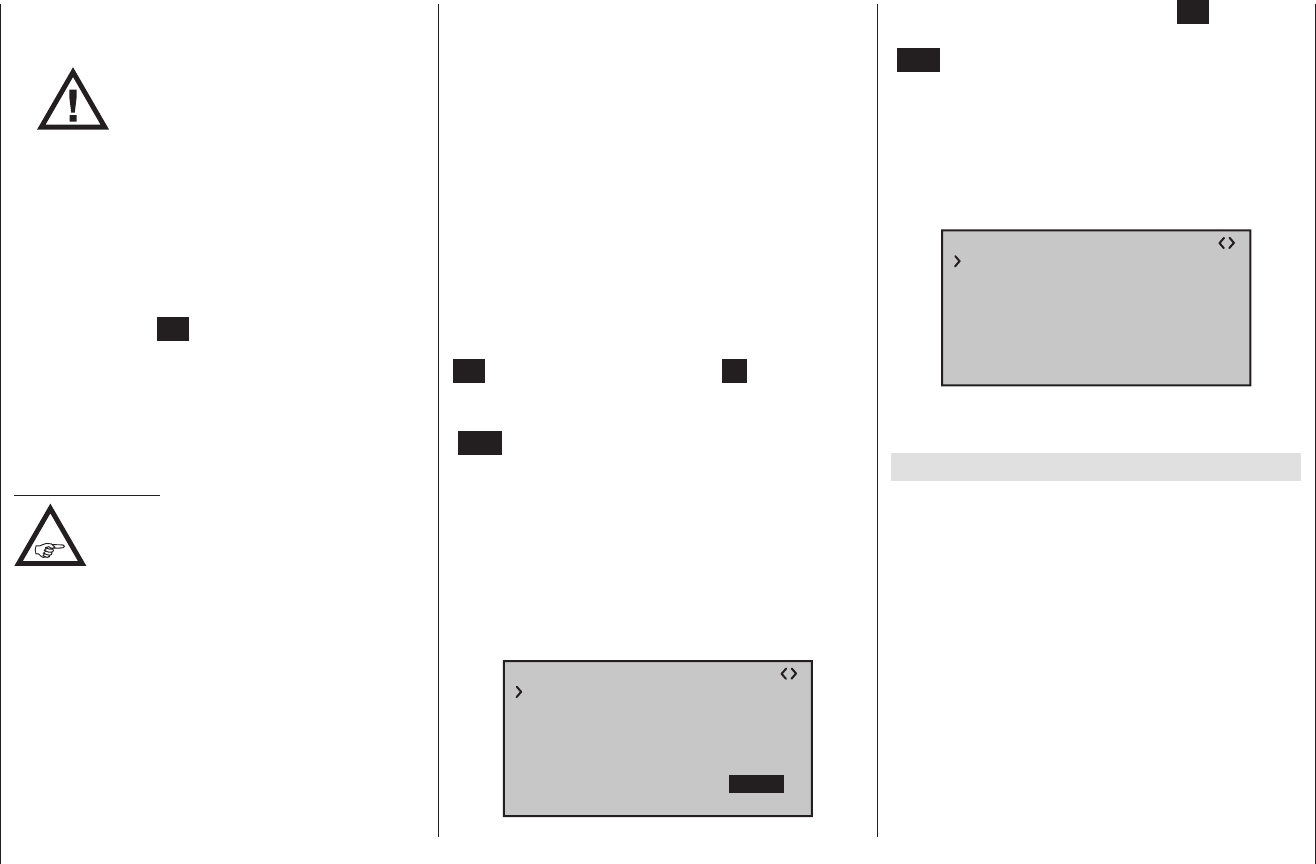
In der untersten Zeile „POSITION“ wird die aktuelle
Servoposition für den gerade ausgewählten OUTPUT
CH angezeigt, z. B.:
RX FAIL SAFE V6.37
INPUT CH: 01
MODE : FAI-SAFE
F.S.POS. : 1500µsec
DELAY : 0.75sec
OUTPUT CH: 01
POSITION : 1670µsec
FAIL SAFE ALL: SAVE
Nach erneutem Antippen der zentralen SET-Taste der
rechten Touch-Taste wechselt die Anzeige wieder von
„SAVE“ nach „NO“.
Die Positionen aller von dieser Maßnahme betroffenen
Servos wurden damit abgespeichert und parallel dazu in
die Zeile „F.S.Pos.“ übernommen, sodass der Empfän-
ger im Störungsfall darauf zurückgreifen kann.
Die Bedienelemente des Senders können Sie nun
wieder loslassen.
RX FAIL SAFE V6.37
INPUT CH: 01
MODE : FAI-SAFE
F.S.POS. : 1670µsec
DELAY : 0.75sec
OUTPUT CH: 01
POSITION : 1670µsec
FAIL SAFE ALL: NO
Schalten Sie den Sender aus und überprüfen Sie die
Fail-Safe-Positionen anhand der Servoausschläge.
„Fail Safe“ in Kombination mit „Channel Mapping“
Um sicherzustellen, dass auch im Störungsfall ge-
mappte Servos – also Servos, welche von einem
gemeinsamen Steuerkanal (INPUT CH) angesteuert
werden – gleichartig reagieren, bestimmen die entspre-
chenden Einstellungen des INPUT CH das Verhalten
gemappter Servos!!!
Werden demnach beispielsweise die Servoanschlüsse
6, 7 und 8 eines Empfängers miteinander gemappt,
indem den OUTPUT CH (Servoanschlüssen) 06, 07 und
08 als INPUT CH der jeweils gleiche Steuerkanal „04“
zugewiesen wird …