
User manual










Table Of Contents
- Programmier-Handbuch mx-16 HoTT
- Inhaltsverzeichnis
- Warn- und Hinweissymbole sowie deren Bedeutung
- Hinweise zum Umweltschutz
- Sicherheitshinweise
- Sicherheitshinweise und Behandlungsvorschriften für Nickel-Metall-Hydrid Akkumulatoren
- Einleitung
- Betriebshinweise
- Senderbeschreibung
- Inbetriebnahme des Senders
- Inbetriebnahme des Empfängers
- Installationshinweise
- Digitale Trimmung
- Begriffsdefinitionen
- Schalter- und Geberschalterzuordnung
- "Binden" von Sender und Empfänger
- Was ist ein Mischer?
- Allgemeine Anmerkungen zu frei programmierbaren Mixern
- Flächenmodelle
- Empfängerbelegung
- Bindungs Typ
- „Binden“ von Sender und Empfänger
- Programmbeschreibung im Detail
- Neuen Speicherplatz belegen
- Modellspeicher
- Grundeinstellung
- Servoeinstellung
- Gebereinstellung
- D/R Expo
- Phasentrim
- Flächenmix
- Mischerneutralpunkte
- QR - Diff. (Querruderdifferenzierung)
- WK - Diff. (Wölbklappendifferenzierung)
- QR => SR (Querruder => Seitenruder)
- QR => WK (Querruder => Wölbklappe)
- Bremse => HR (Bremse => Höhenruder)
- Bremse => WK (Bremse => Wölbklappe)
- Bremse => QR (Bremse => Querruder)
- Kombination der Mischer Bremse => N.N.*: „Krähenstellung“ oder „Butterfly“
- HR => WK (Höhenruder => Wölbklappe)
- HR QR (Höhenruder Querruder)
- WK => HR (Wölbklappe => Höhenruder)
- WK => QR (Wölbklappe => Querruder)
- Diff.-Red. (Differenzierungsreduktion)
- Freie Mixer
- Servoanzeige
- Allgemeine Einstellungen
- Fail Safe
- Telemetrie
- Lehrer/Schüler
- Info-Anzeige
- Programmierbeispiele
- Vorbereitende Maßnahmen am Beispiel eines Flächenmodells
- Erste Schritte bei der Programmierung eines neuen Modells
- Einbindung eines Elektroantriebs in die Modellprogrammierung
- Betätigung des E-Motors und Butterfly mit K1-Steuerknüppel
- Uhren-Betätigung durch K1-Steuerknüppel oder Schalter SW 1 9
- Verwenden von Flugphasen
- Parallel laufende Servos
- Delta- und Nurflügelmodelle
- F3A-Modell
- Hubschraubermodelle
- Empfängerbelegung
- Bindungs Typ
- „Binden“ von Sender und Empfänger
- Programmbeschreibung im Detail
- Neuen Speicherplatz belegen
- Modellspeicher
- Grundeinstellung
- Servoeinstellung
- Gebereinstellung
- D/R Expo
- Helimix
- Freie Mixer
- TS-Mixer
- Servoanzeige
- Allgemeine Einstellungen
- Fail Safe
- Telemetrie
- Lehrer/Schüler
- Info-Anzeige
- mx-16 HoTT Programmierbeispiele
- Anhang
- Konformitätserklärung
- Garantieurkunde
154
Programmbeschreibung: Telemetrie
Reverse (Servo-Umkehr)
Stellt die Drehrichtung des an den gewählten Steuerka-
nal angeschlossenen Servos ein:
Servo-Reverse ON / OFF
CENTER (Servo-Mitte)
In der Zeile „CENTER“ wird die aktuell gespeicherte
Impulszeit für „Servo-Mitte“ des in der Zeile „OUTPUT
CH“ gewählten Steuerkanals in µs angezeigt. Die
vorgegebene Kanalimpulszeit von 1500 µs entspricht der
standardmäßigen Mittenposition und damit der üblichen
Servomitte.
Um diesen Wert zu verändern, wählen Sie die Zeile
„CENTER“ an und tippen dann auf die zentrale Taste
SET der rechten Touch-Taste. Das Wertefeld wird invers
dargestellt. Nun bewegen Sie den entsprechenden
Geber, Steuerknüppel und/oder Trimmhebel in die
gewünschte Position und speichern die aktuelle Geber-
position durch erneutes Antippen der Taste SET. Diese
Position wird als neue Neutralposition abgespeichert.
Der nun angezeigte – neue – Wert ist abhängig von der
aktuellen Stellung des diesen Steuerkanal beeinflussen-
den Gebers und ggf. der Stellung von dessen Trimmung.
TRIM (Trimmposition)
In der Zeile „TRIM“ können Sie die Neutralposition eines
an den in der Zeile „OUTPUT CH“ gewählten Steuerka-
nal angeschlossenen Servos mittels der Auswahltasten
der rechten Touch-Taste in 1-µs-Schritten feinfühlig
nachjustieren: Um den hier eingestellten TRIM-Wert ist
der Wert in der Zeile „CENTER“ im Bereich von ±120 µs
anpassbar.
Werkseinstellung: 0 µs.
LIMIT–/+ (seitenabhängige Wegbegrenzung –/+)
Diese Option dient zur Einstellung einer seitenabhängi-
gen Begrenzung (Limitierung) des Servowegs (Ruder-
ausschlag) des am in der Zeile „OUTPUT CH“ gewähl-
ten Steuerkanal angeschlossenen Servos.
Die Einstellung erfolgt getrennt für beide Richtungen im
Bereich von 30 … 150 %.
Werkseinstellung: je 150 %.
PERIOD (Zykluszeit)
In dieser Zeile bestimmen Sie den Zeitabstand der
einzelnen Kanalimpulse. Diese Einstellung wird für alle
Steuerkanäle übernommen.
Bei ausschließlicher Verwendung von Digitalservos kann
eine Zykluszeit von 10 ms eingestellt werden.
Im Mischbetrieb oder bei ausschließlicher Verwendung
von Analogservos sollte unbedingt 20 ms eingestellt
sein, da letztere andernfalls „überfordert“ sein können
und infolgedessen mit „Zittern“ oder „Knurren“ reagieren.
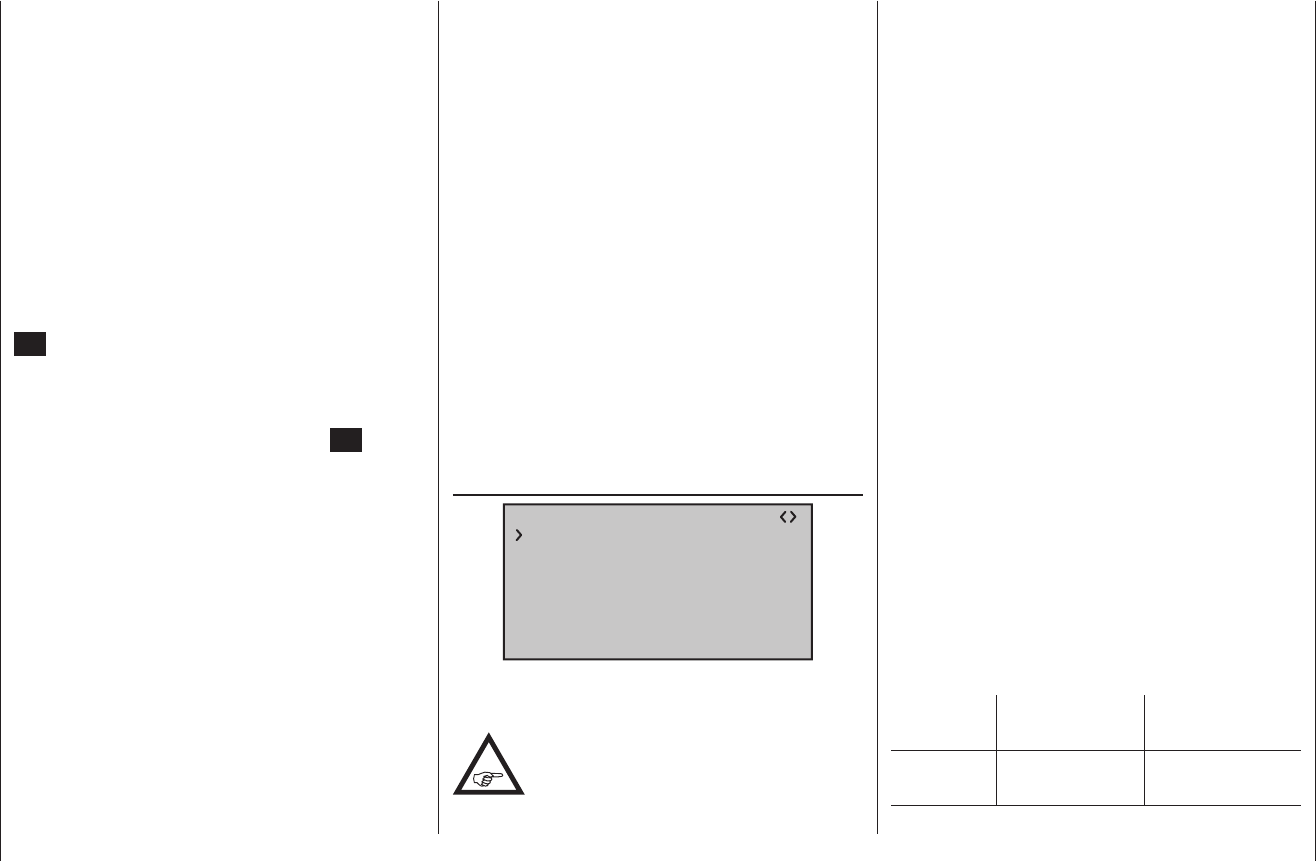
RX FAIL SAFE
RX FAIL SAFE V6.37
INPUT CH: 01
MODE : HOLD
F.S.POS. : 1500µsec
DELAY : 0.75sec
OUTPUT CH: 01
FAIL SAFE ALL: NO
POSITION : 1500µsec
Der Beschreibung dieses Menüs vorangestellt seien ein
paar mahnende Worte:
„Nichts tun” ist das schlechteste, was diesbe-
züglich getan werden kann. In der Grundein-
stellung des HoTT-Empfängers ist nämlich
„HOLD” vorgegeben.
Im Falle einer Störung fliegt günstigstenfalls das Flug-
modell unbestimmte Zeit geradeaus und „landet” dann
hoffentlich irgendwo, ohne größeren Schaden anzurich-
ten! Passiert so etwas allerdings an unrechtem Ort und
zu unrechter Zeit, dann könnte z. B. das Motormodell un-
steuerbar und somit auch unkontrollierbar übers Flugfeld
„rasen” und Piloten und/oder Zuschauer gefährden!
Deshalb sollte schon bedacht werden, ob zur Vermei-
dung derartiger Risiken nicht doch wenigstens „Motor
aus” programmiert werden sollte!? Ziehen Sie ggf. einen
kompetenten Piloten zu Rate, für Ihr Modell eine „sinn-
volle“ Einstellung zu finden.
Und nach dem „erhobenen Zeigefinger“ noch ein kurzer
Hinweis auf die drei möglichen Varianten des Senders
mx-16 HoTT zur Einstellung von Fail Safe:
Der einfachste und auch empfohlene Weg zu Fail-Sa-
fe-Einstellungen ist die Benutzung des aus der Multi-
funktionsliste erreichbaren Menüs »Fail Safe«, siehe
Seite 148.
Ähnlich, wenn auch etwas umständlicher zu erreichen,
funktioniert die auf der nächsten Doppelseite beschrie-
bene Option „FAIL SAFE ALL“.
Und darüber hinaus steht noch die relativ aufwendige
Methode der individuellen Einstellung innerhalb des
Untermenüs „RX FAIL SAFE“ des »Telemetrie«-Menüs
mittels der Optionen „MODE“, „F.S.Pos.“ und „DELAY“
zur Verfügung. Die Beschreibung dieser Variante beginnt
mit der Option „MODE“ weiter unten.
Wert Erläuterung
mögliche
Einstellungen
Vx.xx Firmwareversion
des Empfängers
keine