
User manual










Table Of Contents
- Programmier-Handbuch mx-16 HoTT
- Inhaltsverzeichnis
- Warn- und Hinweissymbole sowie deren Bedeutung
- Hinweise zum Umweltschutz
- Sicherheitshinweise
- Sicherheitshinweise und Behandlungsvorschriften für Nickel-Metall-Hydrid Akkumulatoren
- Einleitung
- Betriebshinweise
- Senderbeschreibung
- Inbetriebnahme des Senders
- Inbetriebnahme des Empfängers
- Installationshinweise
- Digitale Trimmung
- Begriffsdefinitionen
- Schalter- und Geberschalterzuordnung
- "Binden" von Sender und Empfänger
- Was ist ein Mischer?
- Allgemeine Anmerkungen zu frei programmierbaren Mixern
- Flächenmodelle
- Empfängerbelegung
- Bindungs Typ
- „Binden“ von Sender und Empfänger
- Programmbeschreibung im Detail
- Neuen Speicherplatz belegen
- Modellspeicher
- Grundeinstellung
- Servoeinstellung
- Gebereinstellung
- D/R Expo
- Phasentrim
- Flächenmix
- Mischerneutralpunkte
- QR - Diff. (Querruderdifferenzierung)
- WK - Diff. (Wölbklappendifferenzierung)
- QR => SR (Querruder => Seitenruder)
- QR => WK (Querruder => Wölbklappe)
- Bremse => HR (Bremse => Höhenruder)
- Bremse => WK (Bremse => Wölbklappe)
- Bremse => QR (Bremse => Querruder)
- Kombination der Mischer Bremse => N.N.*: „Krähenstellung“ oder „Butterfly“
- HR => WK (Höhenruder => Wölbklappe)
- HR QR (Höhenruder Querruder)
- WK => HR (Wölbklappe => Höhenruder)
- WK => QR (Wölbklappe => Querruder)
- Diff.-Red. (Differenzierungsreduktion)
- Freie Mixer
- Servoanzeige
- Allgemeine Einstellungen
- Fail Safe
- Telemetrie
- Lehrer/Schüler
- Info-Anzeige
- Programmierbeispiele
- Vorbereitende Maßnahmen am Beispiel eines Flächenmodells
- Erste Schritte bei der Programmierung eines neuen Modells
- Einbindung eines Elektroantriebs in die Modellprogrammierung
- Betätigung des E-Motors und Butterfly mit K1-Steuerknüppel
- Uhren-Betätigung durch K1-Steuerknüppel oder Schalter SW 1 9
- Verwenden von Flugphasen
- Parallel laufende Servos
- Delta- und Nurflügelmodelle
- F3A-Modell
- Hubschraubermodelle
- Empfängerbelegung
- Bindungs Typ
- „Binden“ von Sender und Empfänger
- Programmbeschreibung im Detail
- Neuen Speicherplatz belegen
- Modellspeicher
- Grundeinstellung
- Servoeinstellung
- Gebereinstellung
- D/R Expo
- Helimix
- Freie Mixer
- TS-Mixer
- Servoanzeige
- Allgemeine Einstellungen
- Fail Safe
- Telemetrie
- Lehrer/Schüler
- Info-Anzeige
- mx-16 HoTT Programmierbeispiele
- Anhang
- Konformitätserklärung
- Garantieurkunde
148
Programmbeschreibung: Fail Safe
Blättern Sie mit den Auswahltasten der linken oder
rechten Touch-Taste zum Menüpunkt »Fail-Safe« des
Multifunktionsmenüs:
Mod.Speich
Servoeinst
Flächenmix
Grundeinst
Gebereinst
Phasentrim
Servoanz.
Telemetrie
D/R Expo
Freie Mix.
Allg.Einst
Fail-Safe
Mod.Speich
Servoeinst
Freie Mix
Grundeinst
Gebereinst
Helimix
Servoanz.
Telemetrie
D/R Expo
TS-Mixer
Allg.Einst
Fail-Safe
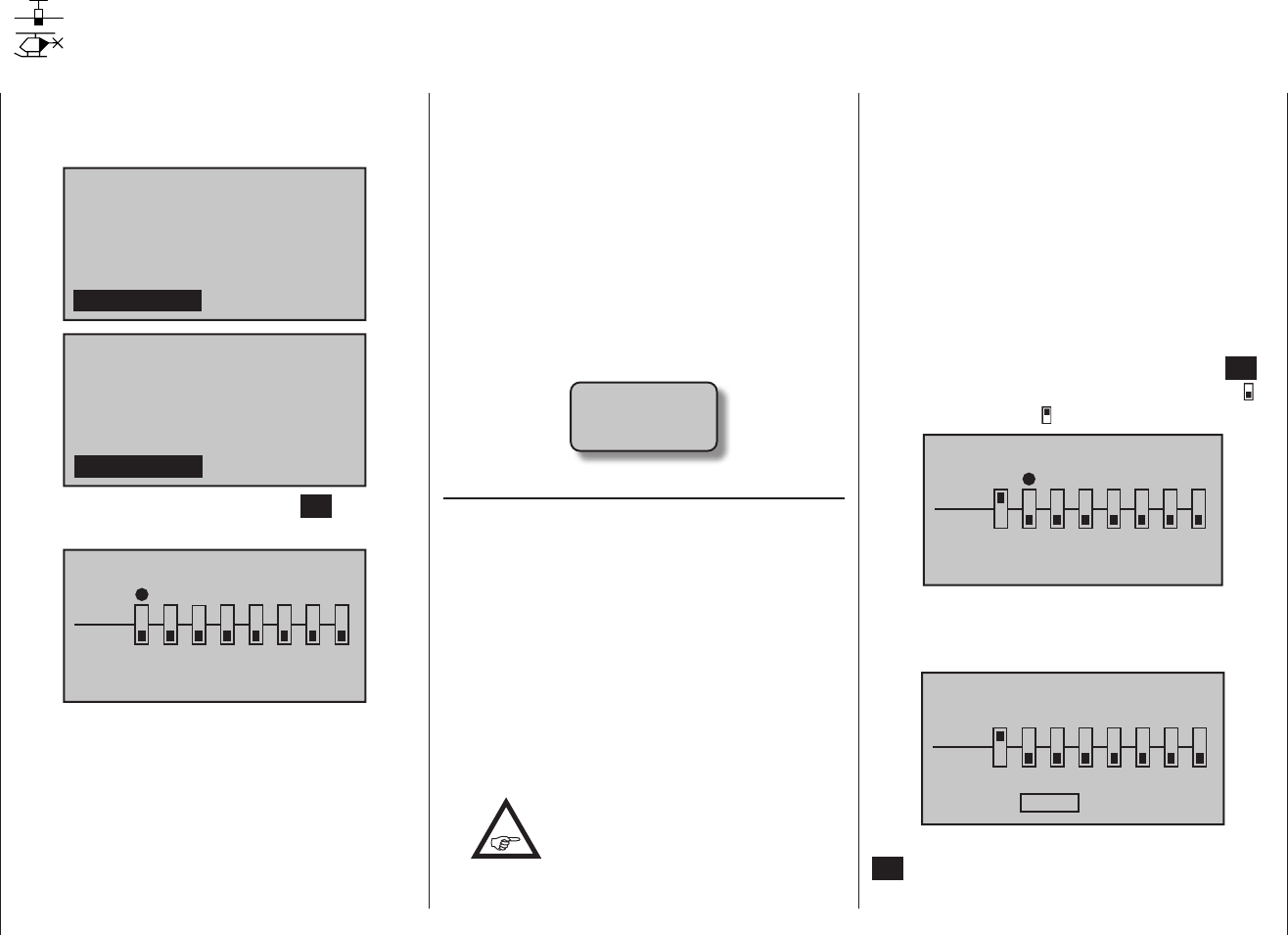
Mit einem kurzen Druck auf die zentrale SET-Taste der
rechten Touch-Taste öffnen Sie diesen Menüpunkt:
FAIL SAFE
Pos
halt
1 2 3
4
5
6
7 8
Verzög 0.25s STO
Die systembedingte höhere Betriebssicherheit des
HoTT-Systems gegenüber der klassischen PPM-Tech-
nologie ergibt sich daraus, dass der im HoTT-Empfänger
eingebaute Mikroprozessor nicht nur ausschließlich
die Signale „seines“ Senders verarbeitet sondern auch
„unsauber“ empfangene Steuersignale noch aufbereiten
kann. Erst wenn diese, z. B. durch Fremdstörungen, zu
sehr verfälscht oder gar verstümmelt wurden, ersetzt der
Prozessor – abhängig von den nachfolgend beschrie-
benen Einstellungen – die gestörten Signale automatisch
durch im Empfänger zwischengespeicherte Steuersi-
gnale. Dadurch werden z. B. auch kurzzeitige Störungen,
wie Feldstärkelöcher o. ä. ausgeblendet, welche sonst
zu den bekannten „Wacklern“ führen würden. In diesem
Fall leuchtet für die Dauer der Störung die rote LED am
Empfänger.
Solange Sie im aktuell aktiven Modellspeicher noch
keine Fail-Safe-Programmierung vorgenommen haben,
erscheint beim Einschalten des Senders in der Basisan-
zeige für einige Sekunden eine Warnanzeige:
Fail-Safe
ein-
stellen!
Programmierung
Die Funktion „Fail Safe“ bestimmt das Verhalten des
Empfängers sowohl unmittelbar nach dem Einschalten
der Empfangsanlage wie auch im Falle einer Störung
der Übertragung vom Sender zum Empfänger.
Die an den Empfängerausgängen 1 bis max 8 ange-
schlossenen Servos können deshalb …
• … nach dem Einschalten der Empfangsanlage und
solange noch keine Funkverbindung zum Sender
besteht, unverzüglich die zuvor im Empfänger ge-
speicherten Positionen einnehmen. Völlig unabhän-
gig davon, ob der jeweilige Ausgang auf „hold“ oder
„Pos“ programmiert ist.
Standardmäßig ist bis zum erstmaligen
Speichern von Fail-Safe-Positionen die
Mittenposition vorgegeben.
• … im Falle einer Störung wahlweise …
1. … die momentane Position beibehalten („halt“).
Alle auf „halt(en)“ programmierten Servos bleiben
im Falle einer Übertragungsstörung so lange an
den vom Empfänger zuletzt als korrekt erkannten
Positionen stehen, bis ein neues, korrektes Steu-
ersignal beim Empfänger eintrifft.
2. … nach Ablauf der vorgewählten „Verzögerungs-
zeit“ in eine frei wählbare Position („Pos“) bewe-
gen.
Wählen Sie mit den Auswahltasten der linken oder
rechten Touch-Taste den gewünschten Servoanschluss
1 bis 8 (
) und tippen Sie jeweils auf die zentrale SET-
Taste der rechten Touch-Taste, um zwischen „halt-„ ( )
und „Positions“-Modus ( ) beliebig umzuschalten:
FAIL SAFE
Pos
halt
1 2 3
4
5
6
7 8
Verzög 0.25s STO
Wählen Sie anschließend mit den Auswahltasten
der linken oder rechten Touch-Taste die Option „Verzö-
gerung“ im Display links unten an …
FAIL SAFE
Pos
halt
1 2 3
4
5
6
7 8
Verzög 0.25s STO
… und wählen Sie nach einem Antippen der zentralen
SET-Taste der rechten Touch-Taste mit deren Auswahl-
tasten unter den vier möglichen Verzögerungszeiten
Fail Safe