
User manual










Table Of Contents
- Programmier-Handbuch mx-16 HoTT
- Inhaltsverzeichnis
- Warn- und Hinweissymbole sowie deren Bedeutung
- Hinweise zum Umweltschutz
- Sicherheitshinweise
- Sicherheitshinweise und Behandlungsvorschriften für Nickel-Metall-Hydrid Akkumulatoren
- Einleitung
- Betriebshinweise
- Senderbeschreibung
- Inbetriebnahme des Senders
- Inbetriebnahme des Empfängers
- Installationshinweise
- Digitale Trimmung
- Begriffsdefinitionen
- Schalter- und Geberschalterzuordnung
- "Binden" von Sender und Empfänger
- Was ist ein Mischer?
- Allgemeine Anmerkungen zu frei programmierbaren Mixern
- Flächenmodelle
- Empfängerbelegung
- Bindungs Typ
- „Binden“ von Sender und Empfänger
- Programmbeschreibung im Detail
- Neuen Speicherplatz belegen
- Modellspeicher
- Grundeinstellung
- Servoeinstellung
- Gebereinstellung
- D/R Expo
- Phasentrim
- Flächenmix
- Mischerneutralpunkte
- QR - Diff. (Querruderdifferenzierung)
- WK - Diff. (Wölbklappendifferenzierung)
- QR => SR (Querruder => Seitenruder)
- QR => WK (Querruder => Wölbklappe)
- Bremse => HR (Bremse => Höhenruder)
- Bremse => WK (Bremse => Wölbklappe)
- Bremse => QR (Bremse => Querruder)
- Kombination der Mischer Bremse => N.N.*: „Krähenstellung“ oder „Butterfly“
- HR => WK (Höhenruder => Wölbklappe)
- HR QR (Höhenruder Querruder)
- WK => HR (Wölbklappe => Höhenruder)
- WK => QR (Wölbklappe => Querruder)
- Diff.-Red. (Differenzierungsreduktion)
- Freie Mixer
- Servoanzeige
- Allgemeine Einstellungen
- Fail Safe
- Telemetrie
- Lehrer/Schüler
- Info-Anzeige
- Programmierbeispiele
- Vorbereitende Maßnahmen am Beispiel eines Flächenmodells
- Erste Schritte bei der Programmierung eines neuen Modells
- Einbindung eines Elektroantriebs in die Modellprogrammierung
- Betätigung des E-Motors und Butterfly mit K1-Steuerknüppel
- Uhren-Betätigung durch K1-Steuerknüppel oder Schalter SW 1 9
- Verwenden von Flugphasen
- Parallel laufende Servos
- Delta- und Nurflügelmodelle
- F3A-Modell
- Hubschraubermodelle
- Empfängerbelegung
- Bindungs Typ
- „Binden“ von Sender und Empfänger
- Programmbeschreibung im Detail
- Neuen Speicherplatz belegen
- Modellspeicher
- Grundeinstellung
- Servoeinstellung
- Gebereinstellung
- D/R Expo
- Helimix
- Freie Mixer
- TS-Mixer
- Servoanzeige
- Allgemeine Einstellungen
- Fail Safe
- Telemetrie
- Lehrer/Schüler
- Info-Anzeige
- mx-16 HoTT Programmierbeispiele
- Anhang
- Konformitätserklärung
- Garantieurkunde
132
Programmbeschreibung: Helimixer / Autorotationseinstellungen
Helimix
Autorotationseinstellung
Mittels der Autorotation ist sowohl ein Original- wie auch
ein Modellhubschrauber in der Lage, z. B. bei Motoraus-
fall, sicher zu landen. Auch bei Ausfall des Heckrotors
ist das sofortige Abstellen des Motors und die Landung
in Autorotation die einzige Möglichkeit, eine unkontrol-
lierbare, schnelle Drehung um die Hochachse und den
dadurch ausgelösten Absturz zu verhindern – weshalb
auch die Umschaltung IN die Autorotationsphase unver-
zögert erfolgt.
Firmwareversion V1802 und niedriger
Beim Umschalten in die Autorotationsphase verändert
sich das Bild des Helimix-Menüs wie abgebildet:
Heck
Pitch
Gas
Autorot
Gyro
0%
Ein8 0%
0%
–90%
Firmwareversion V1803 und höher
Dem Trend zum Elektrohubschrauber folgend, beträgt
der Vorgabewert in der Zeile „Gasposition AR“ eines neu
initialisierten Modellspeichers nun –100 %:
Heck
Pitch
Gas
Autorot
Gyro
0%
Ein8 0%
0%
–100%
Beim Autorotationsflug wird der Hauptrotor nicht mehr
durch den Motor angetrieben, sondern allein von der
Eigendynamik des Rotors und der im Sinkflug durch die
Rotor ebene strömenden Luft. Da die im solcherart in
Drehung gehaltenen Rotor gespeicherte Energie beim
Abfangen des Hubschraubers jedoch aufgezehrt wird,
ist nicht nur Erfahrung im Umgang mit Hubschrauber-
modellen zwingend erforderlich, sondern auch eine
wohlüberlegte Einstellung der entsprechenden Funkti-
onen.
Der fortgeschrittenere Pilot sollte deshalb in regelmä-
ßigen Abständen Autorotationslandungen üben. Nicht
nur, um gegebenenfalls auf Wettbewerben einen ein-
wandfreien Flugstil zu beweisen, sondern auch, um bei
Motorausfällen den Hubschrauber aus größerer Höhe
schadenfrei landen zu können. Dazu sind im Programm
eine Reihe von Einstellmöglichkeiten vorgesehen, die
hilfreich sind, um den ansonsten motorbetriebenen
Kraftflug zu ersetzen. Beachten Sie, dass die Autoro-
tationseinstellungen eine vollwertige vierte Flugphase
darstellen, die über sämtliche flugphasenabhängigen
Einstellmöglichkeiten verfügt, also insbesondere Trim-
mungen, Pitchkurveneinstellung etc.
Pitch (Pitchkurve (K1 Pitch))
Im Kraftflug wird der maximale Blattwinkel durch die
zur Verfügung stehende Motorleistung begrenzt, in der
Autorotation jedoch erst durch den Strömungsabriss an
den Hauptrotorblättern. Für einen beim Abfangen des
Hubschraubers auch bei absinkender Drehzahl noch
ausreichenden Auftrieb ist daher ein größerer Pitch-
Maximumwert einzustellen. Wechseln Sie dazu mittels
Antippen der zentralen Taste SET der rechten Touch-
Taste auf die Grafikseite von „Pitch“ und bewegen Sie
dann den senkrechten Strich mit dem Steuerknüppel
zu Punkt 5. Stellen Sie diesen zunächst auf einen Wert
ein, der etwa 10 bis 20 % über Ihrem „normalen“ Pitch-
Maximumwert liegt. Stellen Sie NICHT von Anfang an
einen gegenüber dem Normalflug wesentlich größeren
Wert ein, weil sich anderenfalls die Pitchsteuerung nach
dem Umschalten zu unterschiedlich im Vergleich zur
gewohnten Reaktion verhält. Es besteht dann nämlich
die Gefahr, dass beim Abfangen übersteuert wird und
das Modell wieder steigt, worauf dann die Rotordrehzahl
in einiger Höhe über dem Boden zusammenbricht und
das Modell erst recht herunterfällt. Später, nach eini-
gen Probe-Autorotationen, kann der Wert immer noch
nachgestellt werden.
Die Pitch-Minimumeinstellung kann sich von der Nor-
malflugeinstellung unterscheiden. Das hängt von den
Steuergewohnheiten im Normalflug ab. Für die Autorota-
tion müssen Sie in jedem Fall bei Punkt 1 einen so gro-
ßen Pitch-Minimumwert einstellen, dass Ihr Modell aus
dem Vorwärtsflug mit mittlerer Geschwindigkeit in einen
Sinkflug von ca. 60 … 70 Grad bei voll zurückgenom-
menem Pitch gebracht werden kann. Wenn Sie, wie die
meisten Heli-Piloten, eine derartige Einstellung ohnehin
schon im Normalflug benutzen, können Sie diesen Wert
einfach übertragen.
Sollten Sie jedoch Ihr Modell normalerweise in einem
flacheren Winkel „fallen“ lassen, erhöhen Sie den Wert
von „Punkt 1“ und umgekehrt.
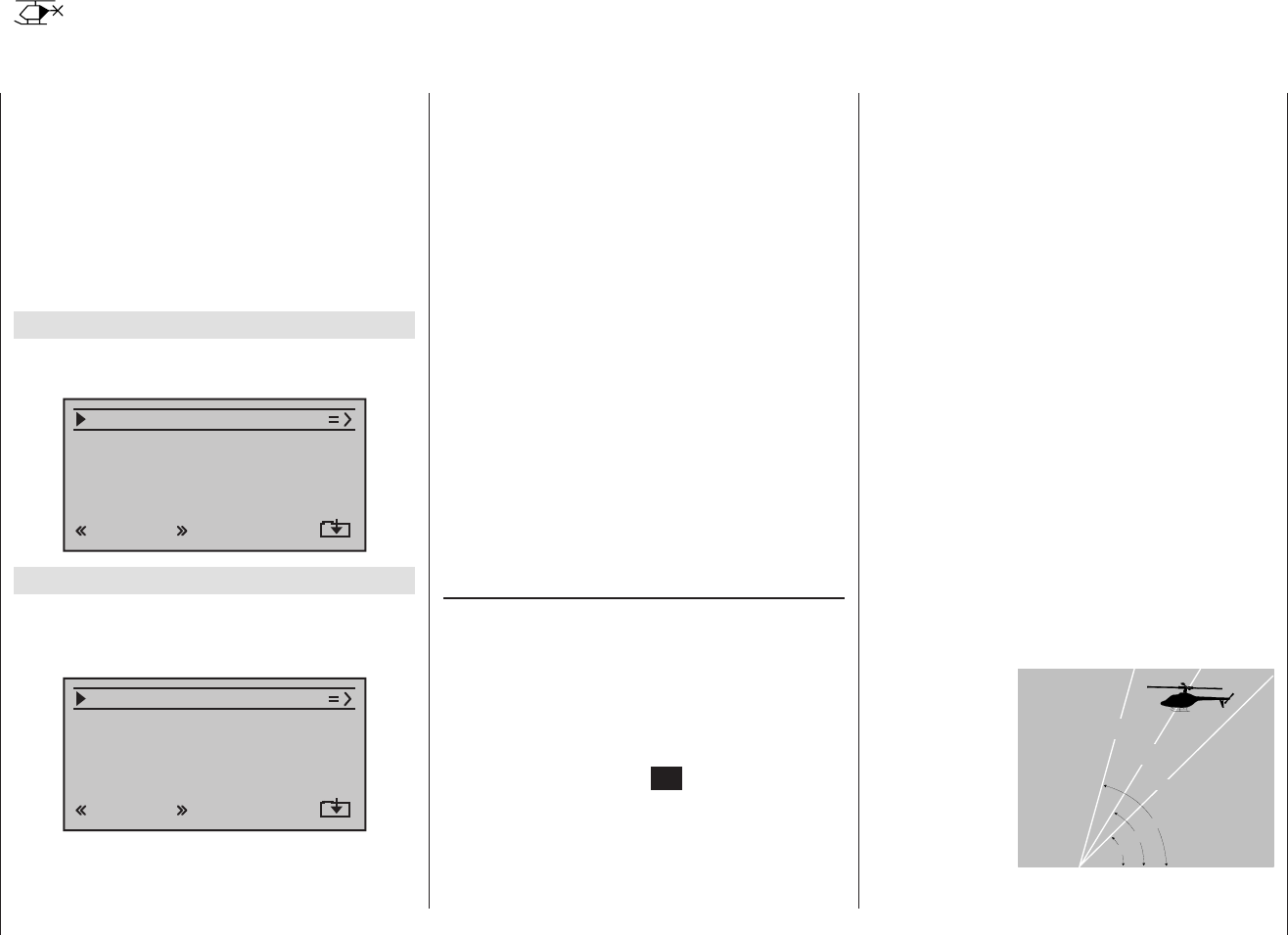
Anflugwinkel bei
unterschiedlichen
Windverhältnissen.
Anflugwinkel
bei starkem
Wind
bei mittlerem
Wind
ohne Wind
45°
60°
75°
Der Pitchknüppel selbst befindet sich in der Autorotation