
User manual










Table Of Contents
- Programmier-Handbuch mx-16 HoTT
- Inhaltsverzeichnis
- Warn- und Hinweissymbole sowie deren Bedeutung
- Hinweise zum Umweltschutz
- Sicherheitshinweise
- Sicherheitshinweise und Behandlungsvorschriften für Nickel-Metall-Hydrid Akkumulatoren
- Einleitung
- Betriebshinweise
- Senderbeschreibung
- Inbetriebnahme des Senders
- Inbetriebnahme des Empfängers
- Installationshinweise
- Digitale Trimmung
- Begriffsdefinitionen
- Schalter- und Geberschalterzuordnung
- "Binden" von Sender und Empfänger
- Was ist ein Mischer?
- Allgemeine Anmerkungen zu frei programmierbaren Mixern
- Flächenmodelle
- Empfängerbelegung
- Bindungs Typ
- „Binden“ von Sender und Empfänger
- Programmbeschreibung im Detail
- Neuen Speicherplatz belegen
- Modellspeicher
- Grundeinstellung
- Servoeinstellung
- Gebereinstellung
- D/R Expo
- Phasentrim
- Flächenmix
- Mischerneutralpunkte
- QR - Diff. (Querruderdifferenzierung)
- WK - Diff. (Wölbklappendifferenzierung)
- QR => SR (Querruder => Seitenruder)
- QR => WK (Querruder => Wölbklappe)
- Bremse => HR (Bremse => Höhenruder)
- Bremse => WK (Bremse => Wölbklappe)
- Bremse => QR (Bremse => Querruder)
- Kombination der Mischer Bremse => N.N.*: „Krähenstellung“ oder „Butterfly“
- HR => WK (Höhenruder => Wölbklappe)
- HR QR (Höhenruder Querruder)
- WK => HR (Wölbklappe => Höhenruder)
- WK => QR (Wölbklappe => Querruder)
- Diff.-Red. (Differenzierungsreduktion)
- Freie Mixer
- Servoanzeige
- Allgemeine Einstellungen
- Fail Safe
- Telemetrie
- Lehrer/Schüler
- Info-Anzeige
- Programmierbeispiele
- Vorbereitende Maßnahmen am Beispiel eines Flächenmodells
- Erste Schritte bei der Programmierung eines neuen Modells
- Einbindung eines Elektroantriebs in die Modellprogrammierung
- Betätigung des E-Motors und Butterfly mit K1-Steuerknüppel
- Uhren-Betätigung durch K1-Steuerknüppel oder Schalter SW 1 9
- Verwenden von Flugphasen
- Parallel laufende Servos
- Delta- und Nurflügelmodelle
- F3A-Modell
- Hubschraubermodelle
- Empfängerbelegung
- Bindungs Typ
- „Binden“ von Sender und Empfänger
- Programmbeschreibung im Detail
- Neuen Speicherplatz belegen
- Modellspeicher
- Grundeinstellung
- Servoeinstellung
- Gebereinstellung
- D/R Expo
- Helimix
- Freie Mixer
- TS-Mixer
- Servoanzeige
- Allgemeine Einstellungen
- Fail Safe
- Telemetrie
- Lehrer/Schüler
- Info-Anzeige
- mx-16 HoTT Programmierbeispiele
- Anhang
- Konformitätserklärung
- Garantieurkunde
127
Programmbeschreibung: Helimixer - Hubschraubermodell
auch ggf. „Heading-Lock-Betrieb“ vorzugeben wie auch
innerhalb dieser Vorwahl einer bestimmten Wirkungsart
normale, langsame Flüge mit maximaler Stabilisierung
zu fliegen und bei schnellen Rundflügen und im Kunst-
flug die Gyrowirkung zu reduzieren.
Nutzen Sie dazu sinngemäß die Flugphasenumschal-
tung zur Eingabe unterschiedlicher Einstellun gen in der
Zeile „Gyro“. Werte zwischen ±125 % sind möglich.
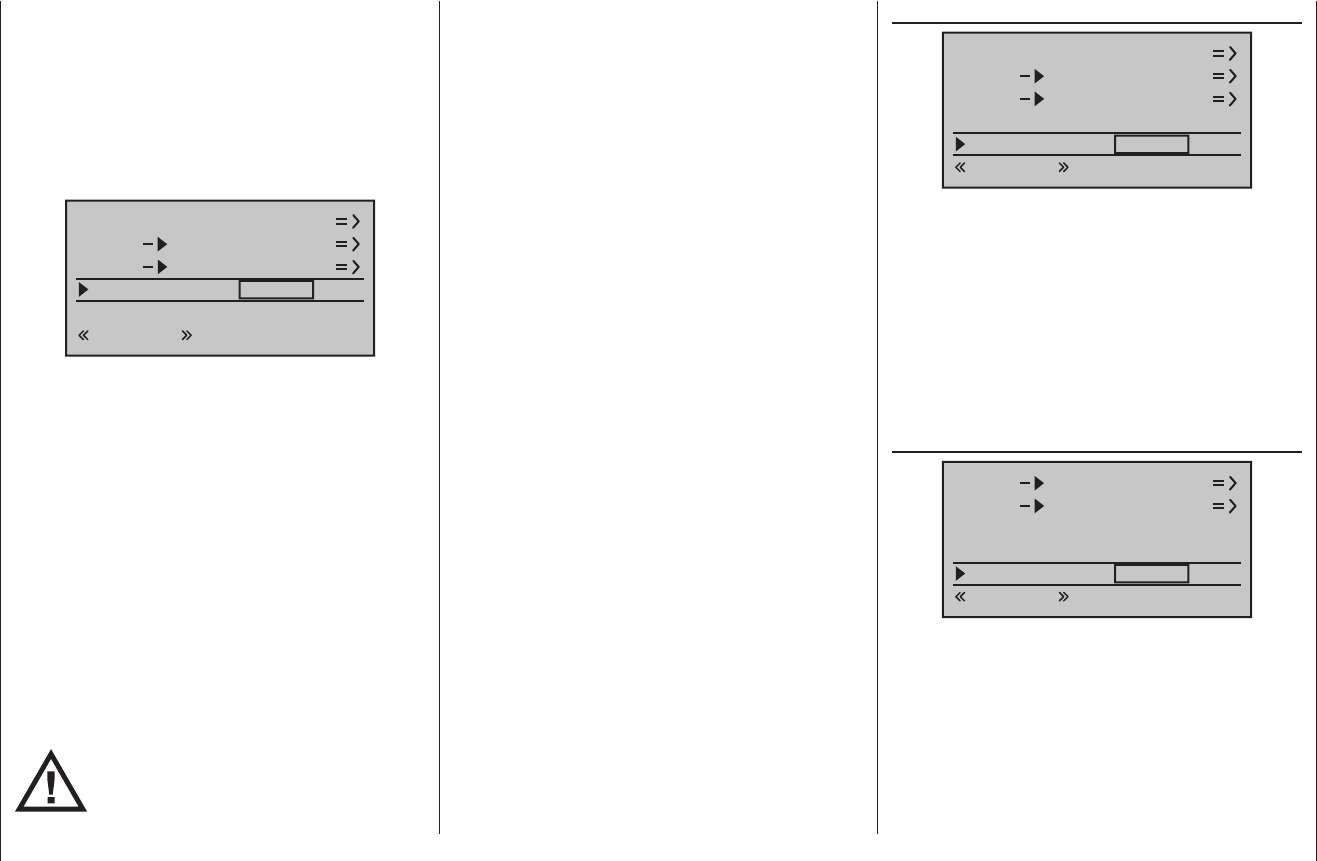
K1
K1
Pitch
Gas
Heck
normal
Gyro
0%
Ein8 0%
Basierend auf diesen flugphasenspezifisch festgelegten
(Offset-) Einstellungen kann die Gyrowirkung mit einem
in der Zeile „Gyr“ des Menüs »Gebereinstellung«, Sei-
te 104, zugewiesenen Geber, z. B. CTRL 8, zusätzlich
stufenlos variiert werden:
• In der Mittelstellung dieses Gebers entspricht die
Gyrowirkung immer den jeweils hier gewählten
Einstellungen.
• Wird der hier beispielhaft verwendete Proportional-
Drehregler CTRL 8 aus der Mittelstellung in Richtung
Vollausschlag gedreht, erhöht sich die Gyrowirkung
entsprechend …
• … und reduziert sich sinngemäß in Richtung des
gegenüberliegenden Anschlags.
ACHTUNG:
Beachten Sie in diesem Zusammenhang
unbedingt die Ihrem Gyro beiliegenden
Einstellhinweise, da Sie ansonsten
riskieren, dass Ihr Heli ggf. unfliegbar wird.
Einstellung des Gyro-Sensors
Um eine maximal mögliche Stabilisierung des Hub-
schraubers um die Hochachse durch den Gyro zu
erzielen, sollten Sie folgende Hinweise beachten:
• Die Ansteuerung sollte möglichst leichtgängig und
spielfrei sein.
• Das Steuergestänge darf nicht federn.
• Ein starkes und v. a. schnelles Servo verwenden.
Je schneller als Reaktion auf eine erkannte Drehung
des Modells eine entsprechend korrigierende Schubän-
derung des Heckrotors wirksam wird, umso weiter kann
die Gyrowirkung aufgedreht werden, ohne dass das
Heck des Modells zu pendeln beginnt, und umso besser
ist auch die Stabilität um die Hochachse. Anderenfalls
besteht die Gefahr, dass das Heck des Modells bereits
bei geringer eingestellter Gyrowirkung zu pendeln
beginnt, was dann durch eine entsprechende weitere
Reduzierung der Gyrowirkung über den Vorgabewert bei
„Gyro“ bzw. den hier beispielhaft verwendeten Proportio-
nal-Drehregler CTRL 8 verhindert werden muss.
Auch eine hohe Vorwärtsgeschwindigkeit des Modells
bzw. Schweben bei starkem Gegenwind kann dazu füh-
ren, dass die stabilisierende Wirkung der Seitenflosse
zusammen mit der Gyrowirkung zu einer Überreaktion
führt, was wiederum durch Pendeln des Rumpfhecks
erkennbar wird. Um in jeder Situation eine optimale
Stabilisierung am Gyro zu erreichen, sollte die Option,
die Gyrowirkung vom Sender aus anpassen zu können,
genutzt werden.
Ein8 (Eingang 8)
K1
K1
Pitch
Gas
Heck
normal
Gyro
0%
Ein8 0%
Die Einstellmöglichkeiten dieser Menüzeile sind nur
dann relevant, wenn ein Drehzahlregler zur Konstanthal-
tung der Systemdrehzahl zur Anwendung kommt und
Sie diesen nach der „klassischen“ Methode ansteuern
möchten. Die Einstellungen sind gemäß der Anleitung
des verwendeten Reglers vorzunehmen.
Komfortabler – bei gleichzeitig erhöhter Sicherheit – ist
jedoch die auf der vorherigen Doppelseite beschriebene
Methode unter Verwendung des Mischers „K1 Gas“.
TS-Limit (Taumelscheibenbegrenzer)
K1
K1
Gas
Heck
normal
Gyro 0%
Ein8 0%
TS-Limit
aus
Diese Funktion wirkt wie eine runde mechanische Ku-
lisse, die den normalerweise rechteckigen Wegbereich
des Knüppels, der die Taumelscheibe steuert, auf einen
kreisförmigen Bereich eingrenzt. Wird nämlich der Hub-
schrauber so eingestellt, dass die Ausschläge von Roll
bzw. Nick das jeweils mechanisch mögliche Maximum
erreichen, wie z. B. beim 3D-Helifliegen, dann erreicht
bei gleichzeitigem vollen Ausschlag von Roll und Nick