
Switch User Manual










Table Of Contents
- Contents
- 1 Safety Information
- 2 Introduction
- 3 Mechanical Installation
- 4 Electrical Installation
- 5 Getting Started
- 6 Protocols
- 7 Drive profile (DSP-402) support
- 7.1 0x6040 Controlword
- 7.2 0x6041 Statusword
- 7.3 Common profile features
- 7.3.1 Sequencing control
- 7.3.2 0x605A Quick stop option code
- 7.3.3 0x605B Shutdown_option_code
- 7.3.4 0x605C Disable_operation_option_code
- 7.3.5 0x605E Fault_reaction_option_code
- 7.3.6 0x6060 Modes_of_operation
- 7.3.7 0x6061 Modes_of_operation_display
- 7.3.8 0x6085 Quick_stop_deceleration
- 7.3.9 Profile units
- 7.3.10 0x608F Position_encoder_resolution
- 7.3.11 0x6091 Gear_ratio
- 7.3.12 0x6092 Feed_constant
- 7.3.13 Basic position control
- 7.3.14 0x6062 Position_demand_value
- 7.3.15 0x6064 Position_actual_value
- 7.3.16 0x60F4 Following_error_actual_value
- 7.3.17 0x60FB Position_control_parameter_set object
- 7.4 Interpolated position mode
- 7.5 vl velocity mode
- 7.5.1 0x6042 vl_target_velocity
- 7.5.2 0x6043 vl_velocity_demand
- 7.5.3 0x6044 vl_velocity_actual_value
- 7.5.4 0x6046 vl_velocity_min_max_amount
- 7.5.5 0x6047 vl_velocity_min_max
- 7.5.6 0x6048 vl_velocity_acceleration
- 7.5.7 0x6049 vl_velocity_deceleration
- 7.5.8 0x604A vl_velocity_quick_stop
- 7.5.9 0x604B vl_setpoint_factor
- 7.5.10 0x604C vl_dimension_factor
- 7.6 Profile Torque mode
- 7.7 Homing Mode
- 8 Advanced features
- 9 Diagnostics
- 9.1 Module identification parameters
- 9.2 Network configuration objects
- 9.3 Diagnostic parameters
- 9.4 Drive trip display codes
- 9.5 SM-EtherCAT module temperature
- 9.6 SM-EtherCAT serial number
- 9.7 SM-EtherCAT error codes
- 9.8 Critical task % free
- 9.9 Worst case critical task % free
- 9.10 FLASH file system % free
- 9.11 Updating SM-EtherCAT firmware
- 10 Quick Reference
- 11 Glossary Of Terms
- Index
SM-EtherCAT User Guide 41
Issue Number: 2 www.controltechniques.com
Safety
Information
Introduction
Mechanical
Installation
Electrical
Installation
Getting Started Protocols
Drive profile (DSP-402)
support
Advanced
features
Diagnostics
Quick
Reference
Glossary Of
Terms
Index
The time period is checked to ensure that it is an integer multiple of the control loop
cycle time. Only linear interpolation is currently supported. This type inserts a delay of
one interpolation time period.
The input buffer has a maximum size of 1 data record, and a data record contains one
position in profile-defined units. The buffer is a FIFO buffer. Every interpolator time
period, a value is read from this buffer. The correct number of data points for a specific
interpolation mode are stored internally. When a new position command is loaded in, the
oldest position command in the data set is discarded.
7.5 vl velocity mode
Velocity mode is supported on Unidrive SP, Digitax ST, Affinity, Mentor MP and
Commander SK. It is not, however, supported in regen modes. This mode uses the
drive’s speed handling and ramps.
When the attached drive is in either of the closed-loop or servo operating modes the
scaled velocity is written to the drive internal speed shortcut. When the attached drive is
in an open-loop operating mode the scaled velocity is written to the user preset
reference parameter (Pr 1.21).
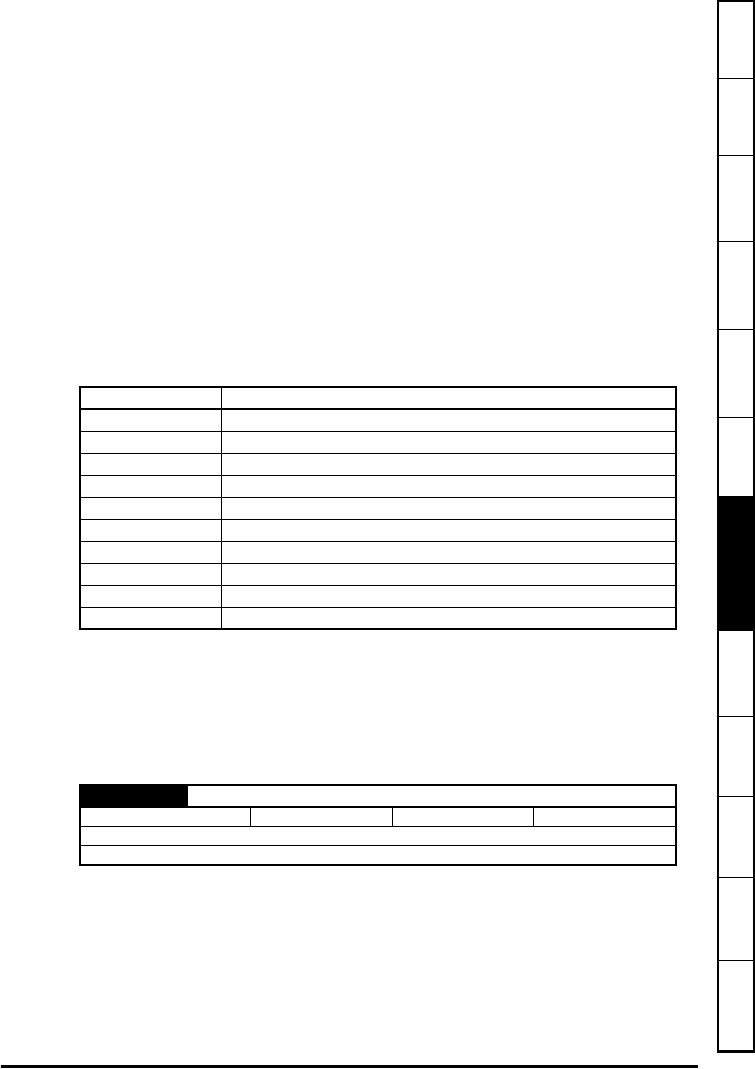
Table 7.36 lists the objects that are supported:
7.5.1 0x6042 vl_target_velocity
This object is used to set the required velocity of the system. It is multiplied by the
vl_dimension_factor and the vl_setpoint_factor. The value is given in rpm, If the
vl_dimension_factor has the value of 1, otherwise the value is in user units. Positive
values indicate forward direction and negative values indicate reverse direction.
Table 7.36 vl velocity mode supported objects
Index Name
0x6042 vl_target_velocity
0x6043 vl_velocity_demand
0x6044 vl_velocity_actual_value
0x6046 vl_velocity_min_max_amount
0x6047 vl_velocity_min_max
0x6048 vl_velocity_accleration
0x6049 vl_velocity_deceleration
0x604A vl_velocity_quick_stop
0x604B vl_setpoint_factor
0x604C vl_dimension_factor
Table 7.37 vl_target_velocity
0x6042 vl_target_velocity
Access: RW Range: -32768 to +32767 Size: Signed 16 Unit: rpm
Default: 0
Description: Used to set the required velocity of the system.