
Switch User Manual









Table Of Contents
- Contents
- 1 Safety Information
- 2 Introduction
- 3 Mechanical Installation
- 4 Electrical Installation
- 5 Getting Started
- 6 Protocols
- 7 Drive profile (DSP-402) support
- 7.1 0x6040 Controlword
- 7.2 0x6041 Statusword
- 7.3 Common profile features
- 7.3.1 Sequencing control
- 7.3.2 0x605A Quick stop option code
- 7.3.3 0x605B Shutdown_option_code
- 7.3.4 0x605C Disable_operation_option_code
- 7.3.5 0x605E Fault_reaction_option_code
- 7.3.6 0x6060 Modes_of_operation
- 7.3.7 0x6061 Modes_of_operation_display
- 7.3.8 0x6085 Quick_stop_deceleration
- 7.3.9 Profile units
- 7.3.10 0x608F Position_encoder_resolution
- 7.3.11 0x6091 Gear_ratio
- 7.3.12 0x6092 Feed_constant
- 7.3.13 Basic position control
- 7.3.14 0x6062 Position_demand_value
- 7.3.15 0x6064 Position_actual_value
- 7.3.16 0x60F4 Following_error_actual_value
- 7.3.17 0x60FB Position_control_parameter_set object
- 7.4 Interpolated position mode
- 7.5 vl velocity mode
- 7.5.1 0x6042 vl_target_velocity
- 7.5.2 0x6043 vl_velocity_demand
- 7.5.3 0x6044 vl_velocity_actual_value
- 7.5.4 0x6046 vl_velocity_min_max_amount
- 7.5.5 0x6047 vl_velocity_min_max
- 7.5.6 0x6048 vl_velocity_acceleration
- 7.5.7 0x6049 vl_velocity_deceleration
- 7.5.8 0x604A vl_velocity_quick_stop
- 7.5.9 0x604B vl_setpoint_factor
- 7.5.10 0x604C vl_dimension_factor
- 7.6 Profile Torque mode
- 7.7 Homing Mode
- 8 Advanced features
- 9 Diagnostics
- 9.1 Module identification parameters
- 9.2 Network configuration objects
- 9.3 Diagnostic parameters
- 9.4 Drive trip display codes
- 9.5 SM-EtherCAT module temperature
- 9.6 SM-EtherCAT serial number
- 9.7 SM-EtherCAT error codes
- 9.8 Critical task % free
- 9.9 Worst case critical task % free
- 9.10 FLASH file system % free
- 9.11 Updating SM-EtherCAT firmware
- 10 Quick Reference
- 11 Glossary Of Terms
- Index
34 SM-EtherCAT User Guide
www.controltechniques.com Issue Number: 2
7.3.3 0x605B Shutdown_option_code
This object is used to control what action is performed if there is a transition from the
Operation Enabled state to the Ready To Switch On state.
7.3.4 0x605C Disable_operation_option_code
Disable drive function (switch-off the drive power stage).
This object is used to control what action is performed if there is a transition from the
‘Operation Enabled’ state to the ‘Switched On’ state.
7.3.5 0x605E Fault_reaction_option_code
This object is used to control what action is performed when a fault is detected. This
object is ignored if the drive is tripped.
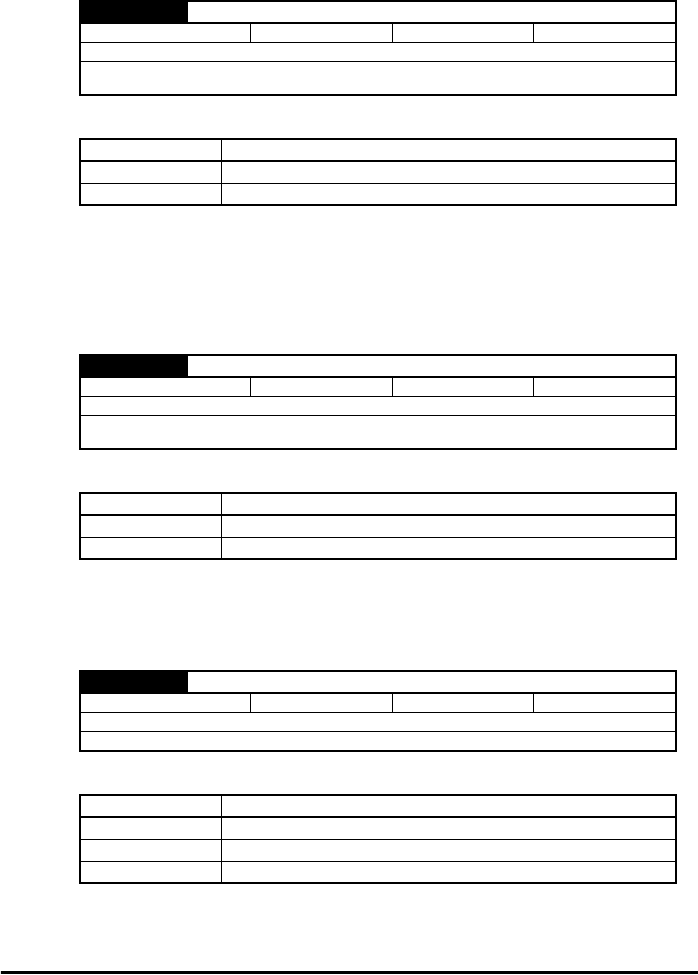
Table 7.11 Shutdown_option_code
0x605B Shutdown_option_code
Access: RW Range: 0 to 1 Size: Unsigned 16 Unit: N/A
Default: N/A
Description: Used to control what action is performed if there is a transition from the Operation Enabled
state to the Ready To Switch On state.
Table 7.12 Shutdown_option_code values
Value Definition
0 Disable drive function (switch-off the drive power stage)
1 Slow down with slow down ramp; disable the drive function
Table 7.13 Disabled_operation_option_code
0x605C Disable_operation_option_code
Access: RW Range: 0 to 1 Size: Unsigned 16 Unit: N/A
Default: N/A
Description: This object is used to control what action is performed if there is a transition from the
Operation Enabled state to the Switched On state.
Table 7.14 Disable_operation_option_code values
Value Definition
0 Disable drive function (switch-off the drive power stage)
1 Slow down with slow down ramp; disable the drive function
Table 7.15 Fault_reaction_option_code
0x605E Fault_reaction_option_code
Access: RW Range: 0 to 2 Size: Unsigned 16 Unit: N/A
Default: N/A
Description: This object is used to control what action is performed when a fault is detected.
Table 7.16 Fault_reaction_option_code values
Value Definition
0 Disable drive function, motor is free to rotate
1 Slow down on slow down ramp
2 Slow down on quick stop ramp