
Installation Guide Instruction Manual










Table Of Contents
- Chapter 1: Safety Information
- Chapter 2: Introduction
- Chapter 3: Installation
- 3.1. Before You Begin
- 3.2. Unpacking the Drive Components
- 3.3. Assembling the Heatsink
- 3.4. Mounting the Harmonica
- 3.5. Connecting the Cables
- 3.5.1. Wiring the Harmonica
- 3.5.2. Connecting the Power Cables (J8)
- 3.5.3. Special Note about Disconnecting Molex Connectors
- 3.5.4. Connecting the Auxiliary Power Cable (J4)
- 3.5.5. Connecting the Feedback and Control Cables
- 3.5.5.1. Main Feedback (Feedback A) Cable (Port J3)
- 3.5.5.2. Communication Cable (Port J1)
- 3.5.5.3. I/O Cables
- 3.5.5.4. Auxiliary Feedback (Port J2)
- 3.5.5.4.a Auxiliary Feedback: Main Encoder Buffered Output or Emulated Encoder Output Option (Port J2)
- 3.5.5.4.b Auxiliary Feedback: Differential Encoder Input Option (Port J2)
- 3.5.5.4.c Auxiliary Feedback: Single-Ended Encoder Input Option (Port J2)
- 3.5.5.4.d Auxiliary Feedback: Pulse-and-Direction Input Option (Port J2)
- 3.6. Powering Up
- 3.7. Initializing the System
- Chapter 4: Technical Specifications
- 4.1. Features
- 4.2. Harmonica Dimensions
- 4.3. Power Ratings
- 4.4. Environmental Conditions
- 4.5. Harmonica Connectors
- 4.6. Auxiliary Power Supply (J4)
- 4.7. Control Specifications
- 4.8. Feedback
- 4.9. I/Os
- 4.10. Communications
- 4.11. Pulse-Width Modulation (PWM)
- 4.12. Heatsink Specifications
- 4.13. Compliance with Standards
Harmonica Installation Guide Introduction
MAN-HARIG (Ver. 1.902)
www.elmomc.com
12
• Tachometer and Potentiometer
• Two inputs for Tachometer Feedback:
Up to ± 50 VDC
Up to ±20 VDC
• Potentiometer Feedback:
0 to 5 V voltage range
Resistance: 100 Ω to 1000 Ω
• Elmo drives provide supply voltage for all the feedback options.
2.2.7. Fault Protection
The Harmonica includes built-in protection against possible fault conditions, including:
• Software error handling
• Status reporting for a large number of possible fault conditions
• Protection against conditions such as excessive temperature, under/over voltage, loss of
commutation signal, short circuits between the motor power outputs and between each
output and power input/return
• Recovery from loss of commutation signals and from communication errors
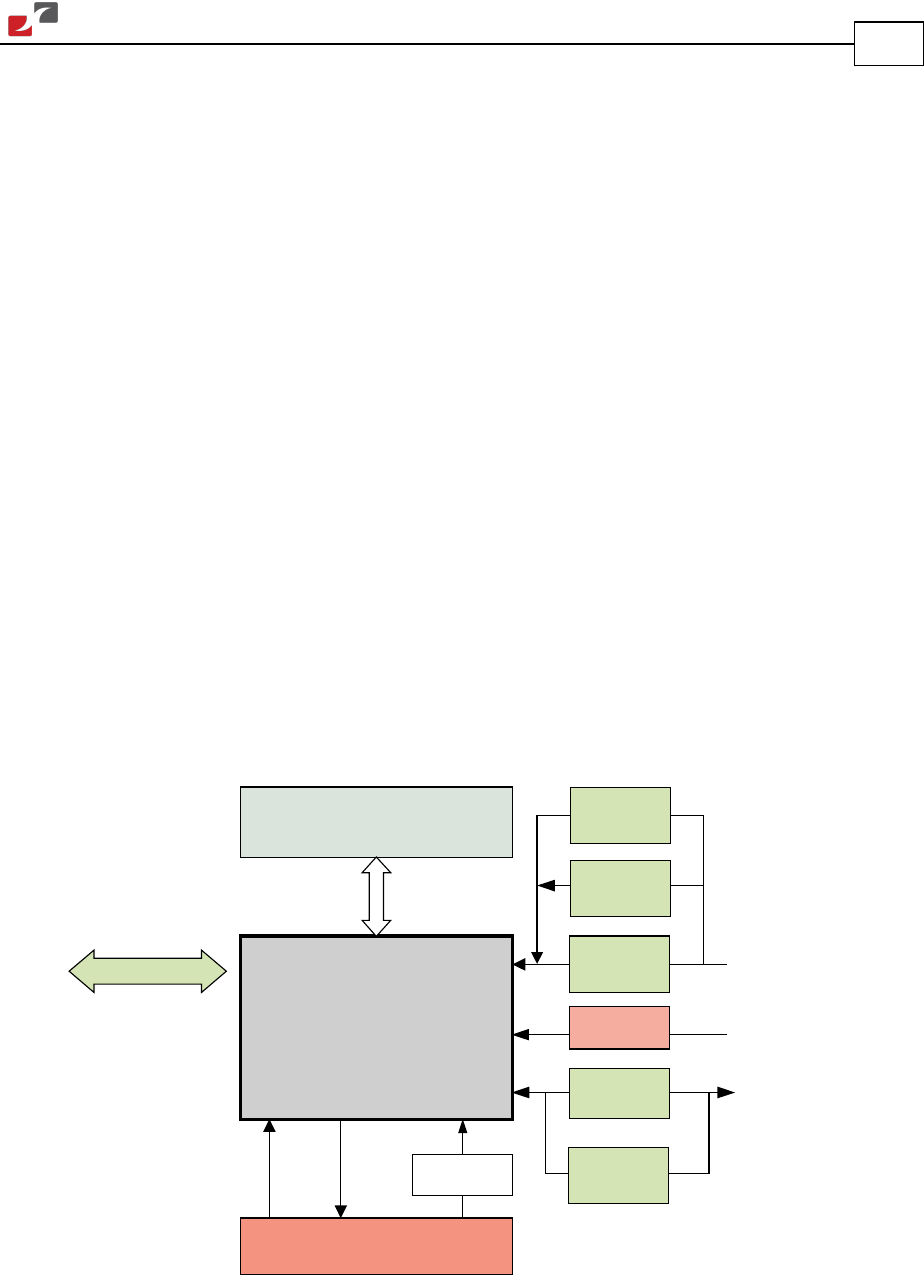
2.3. System Architecture
PWM
Controller
Communication
RS 232 and CANopen
Power Stage
Protection
Current
Feedback
Main
Encoder
SMPS
24 VDC
I/Os
Emulated
Output
Resolver
Analog
Encoder
Auxiliary
Encoder
or
or
Figure 1: Harmonica System Block Diagram