
Manual










Table Of Contents
- Chapter 1: Safety Information
- Chapter 2: Introduction
- Chapter 3: Installation
- 3.1. Before You Begin
- 3.2. Unpacking the Drive Components
- 3.3. Assembling the Heatsink
- 3.4. Mounting the Bassoon
- 3.5. Connecting the Cables
- 3.5.1. Wiring the Bassoon
- 3.5.2. Connecting the Power Cables
- 3.5.3. Connecting the Auxiliary Power Cable (J4)
- 3.5.4. Feedback and Control Cable Assemblies
- 3.5.5. Main Feedback Cable (Port J3)
- 3.5.6. Main and Auxiliary Feedback Combinations
- 3.5.6.1. Main Encoder Buffered Outputs or Emulated Encoder Outputs Option on Feedback B (J2) (YA[4]=4)
- 3.5.6.2. Differential Auxiliary Encoder Input Option on Feedback B (J2) (YA[4]=2)
- 3.5.6.3. Single-Ended Auxiliary Input Option on Feedback B (J2) (YA[4]=2)
- 3.5.6.4. Pulse-and-Direction Input Option on FEEDBACK B (J2) (YA[4]=0)
- 3.5.7. I/O Cables
- 3.5.8. Communication Cable (Port J1, J8, J9)
- 3.6. Powering Up
- 3.7. Initializing the System
- Chapter 4: Technical Specifications
Bassoon Installation Guide Technical Specifications
MAN-BASIG (Ver. 1.502)
www.elmomc.com
64
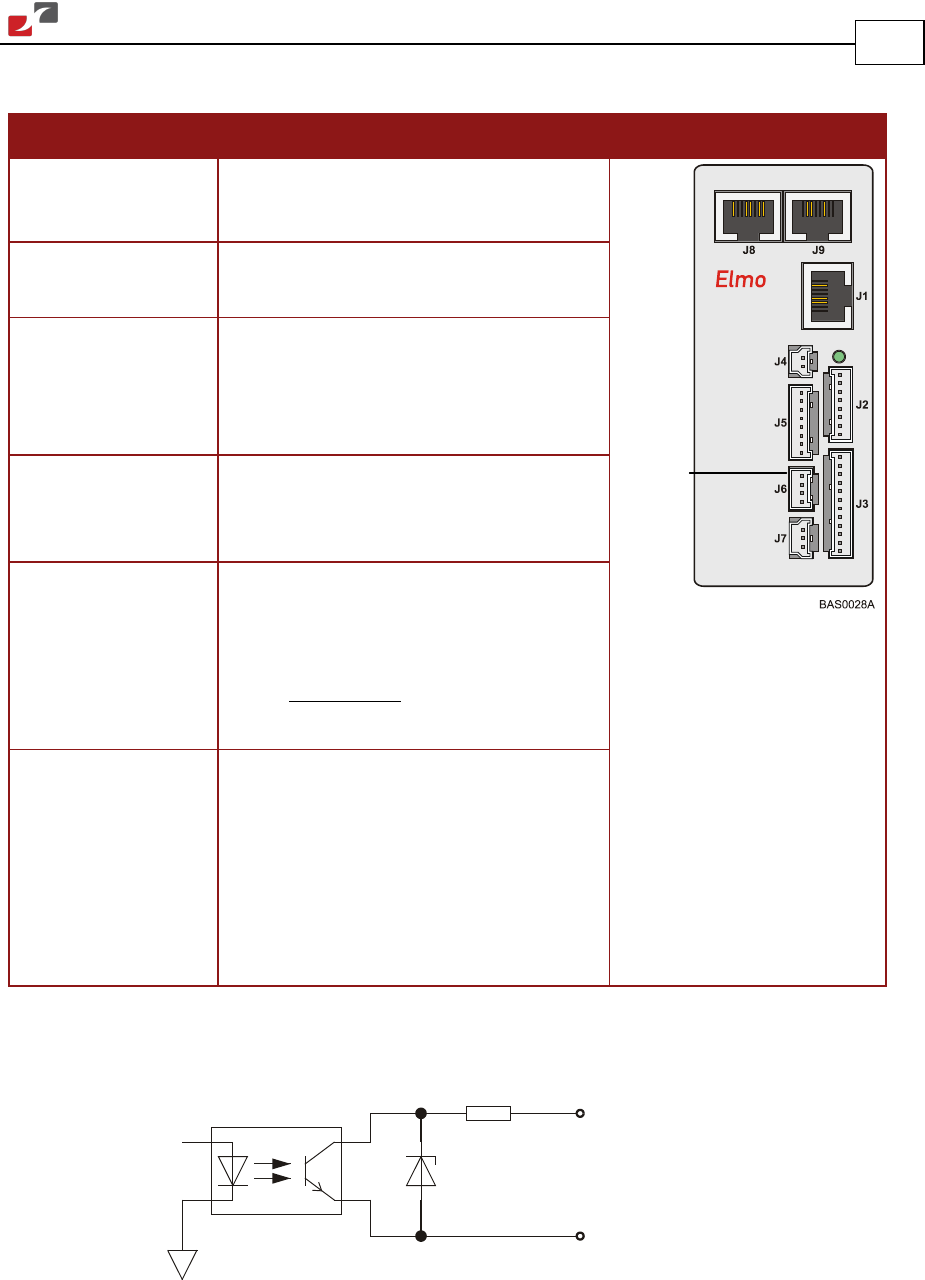
4.8.2. Digital Output Interface
Feature Details Connector Location
Type of output
• Optically isolated
• Open collector and open emitter
Maximum supply
output (Vcc)
30 V
Maximum output
current
Io (max) (Vout =
Low)
Iout (max) ≤ 10 mA
VOL @ maximum
output voltage (low
level)
Vout (on) ≤ 0.3 V + 0.02 * Iout (10 mA)
RL External resistor RL must be selected to
limit output current to no more than 10
mA.
(max)Io
VOLVcc
R
L
−
=
Executable time If output is set to one of the built-in
functions — Home flag, Brake or AOK —
execution is immediate upon detection:
0 < T < 4 x TS
If output is set to General output and is
executed from a program, the typical
time is approximately 0.5 msec.
Rout = 20Ω
33v
OUTput Ret(i)
OUTput (i)
HAR0061A
Figure 33: Digital Output Schematic
Digital
Output