
Manual










Table Of Contents
- Chapter 1: Safety Information
- Chapter 2: Introduction
- Chapter 3: Installation
- 3.1. Before You Begin
- 3.2. Unpacking the Drive Components
- 3.3. Assembling the Heatsink
- 3.4. Mounting the Bassoon
- 3.5. Connecting the Cables
- 3.5.1. Wiring the Bassoon
- 3.5.2. Connecting the Power Cables
- 3.5.3. Connecting the Auxiliary Power Cable (J4)
- 3.5.4. Feedback and Control Cable Assemblies
- 3.5.5. Main Feedback Cable (Port J3)
- 3.5.6. Main and Auxiliary Feedback Combinations
- 3.5.6.1. Main Encoder Buffered Outputs or Emulated Encoder Outputs Option on Feedback B (J2) (YA[4]=4)
- 3.5.6.2. Differential Auxiliary Encoder Input Option on Feedback B (J2) (YA[4]=2)
- 3.5.6.3. Single-Ended Auxiliary Input Option on Feedback B (J2) (YA[4]=2)
- 3.5.6.4. Pulse-and-Direction Input Option on FEEDBACK B (J2) (YA[4]=0)
- 3.5.7. I/O Cables
- 3.5.8. Communication Cable (Port J1, J8, J9)
- 3.6. Powering Up
- 3.7. Initializing the System
- Chapter 4: Technical Specifications
Bassoon Installation Guide Technical Specifications
MAN-BASIG (Ver. 1.502)
www.elmomc.com
63
4.8.1. Digital Input Interfaces
Feature Details
Connector Location
Type of input
• Optically isolated
• Single ended
• PLC level
Input current
Ω
−
=
2500
5
.6
V
Vin
Iin
* Iin = 2.2 mA @ Vin = 12 V
Input current for high
speed inputs
Ω
−
=
1250
5.6 VVin
Iin
* Iin = 4.4 mA @ Vin = 12 V
High-level input
voltage
12 V < Vin < 30 V, 24 V typical
Low-level input
voltage
0 V < Vin < 6.5 V
Minimum pulse width > 4 x TS, where TS is sampling time
Execution time (all
inputs): the time from
application of voltage
on input until
execution is complete
If input is set to one of the built-in functions —
Home, Inhibit, Hard Stop, Soft Stop, Hard and
Soft Stop, Forward Limit, Reverse Limit or
Begin — execution is immediate upon
detection: 0 < T < 4 x T
If input is set to General input, execution
depends on program. Typical execution time:
≅ 0.5 msec.
High-speed inputs -
minimum pulse
width, in high-speed
mode
T < 5 µsec
Notes:
• Home mode is high-speed mode and can be
used for fast capture and precise homing.
• High speed input has a digital filter set to same
value as digital filter (EF) of main encoder.
• Highest speed is achieved when turning on
optocouplers.
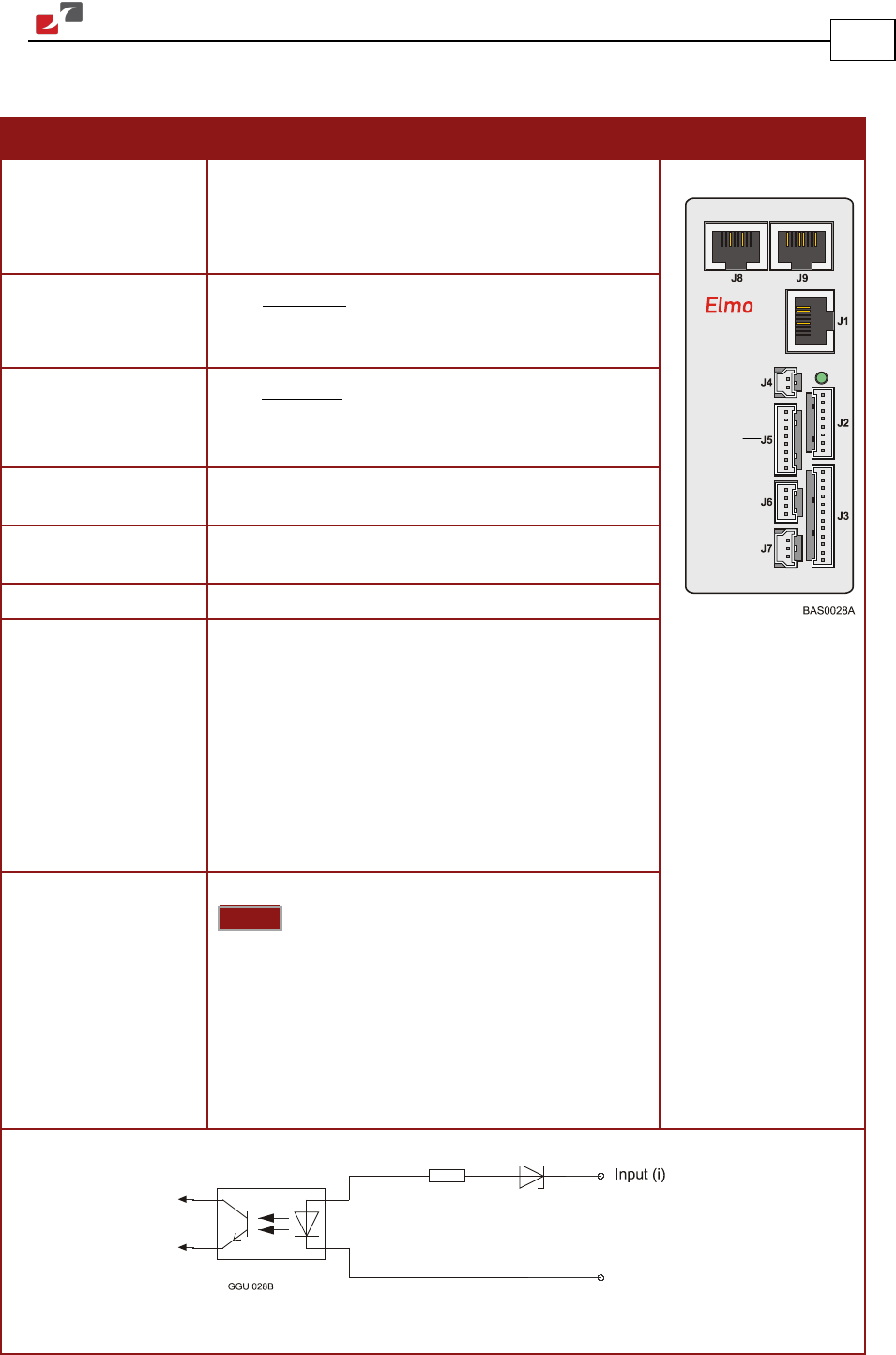
Figure 32: Digital Input Schematic
General input return
Rin = 2.5K
Vz = 5.1 V
Digital
Input