
Manual










Table Of Contents
- Chapter 1: Safety Information
- Chapter 2: Introduction
- Chapter 3: Installation
- 3.1. Before You Begin
- 3.2. Unpacking the Drive Components
- 3.3. Assembling the Heatsink
- 3.4. Mounting the Bassoon
- 3.5. Connecting the Cables
- 3.5.1. Wiring the Bassoon
- 3.5.2. Connecting the Power Cables
- 3.5.3. Connecting the Auxiliary Power Cable (J4)
- 3.5.4. Feedback and Control Cable Assemblies
- 3.5.5. Main Feedback Cable (Port J3)
- 3.5.6. Main and Auxiliary Feedback Combinations
- 3.5.6.1. Main Encoder Buffered Outputs or Emulated Encoder Outputs Option on Feedback B (J2) (YA[4]=4)
- 3.5.6.2. Differential Auxiliary Encoder Input Option on Feedback B (J2) (YA[4]=2)
- 3.5.6.3. Single-Ended Auxiliary Input Option on Feedback B (J2) (YA[4]=2)
- 3.5.6.4. Pulse-and-Direction Input Option on FEEDBACK B (J2) (YA[4]=0)
- 3.5.7. I/O Cables
- 3.5.8. Communication Cable (Port J1, J8, J9)
- 3.6. Powering Up
- 3.7. Initializing the System
- Chapter 4: Technical Specifications
Bassoon Installation Guide Technical Specifications
MAN-BASIG (Ver. 1.502)
www.elmomc.com
59
4.7. Feedback
The Bassoon can receive and process feedback input from diverse types of devices.
4.7.1. Feedback Supply Voltage
Feature Details
J3 (main encoder) supply voltage 5 V ±5% @ 200 mA maximum
J2 (auxiliary encoder) supply voltage 5 V ±5% @ 200 mA maximum
4.7.2. Incremental Encoder
Feature Details
Encoder format
• A, B and Index
• Differential
• Quadrature
Interface: RS-422
Input resistance:
Differential: 120 Ω
Maximum incremental encoder
frequency:
Maximum absolute: 5 MHz pulses
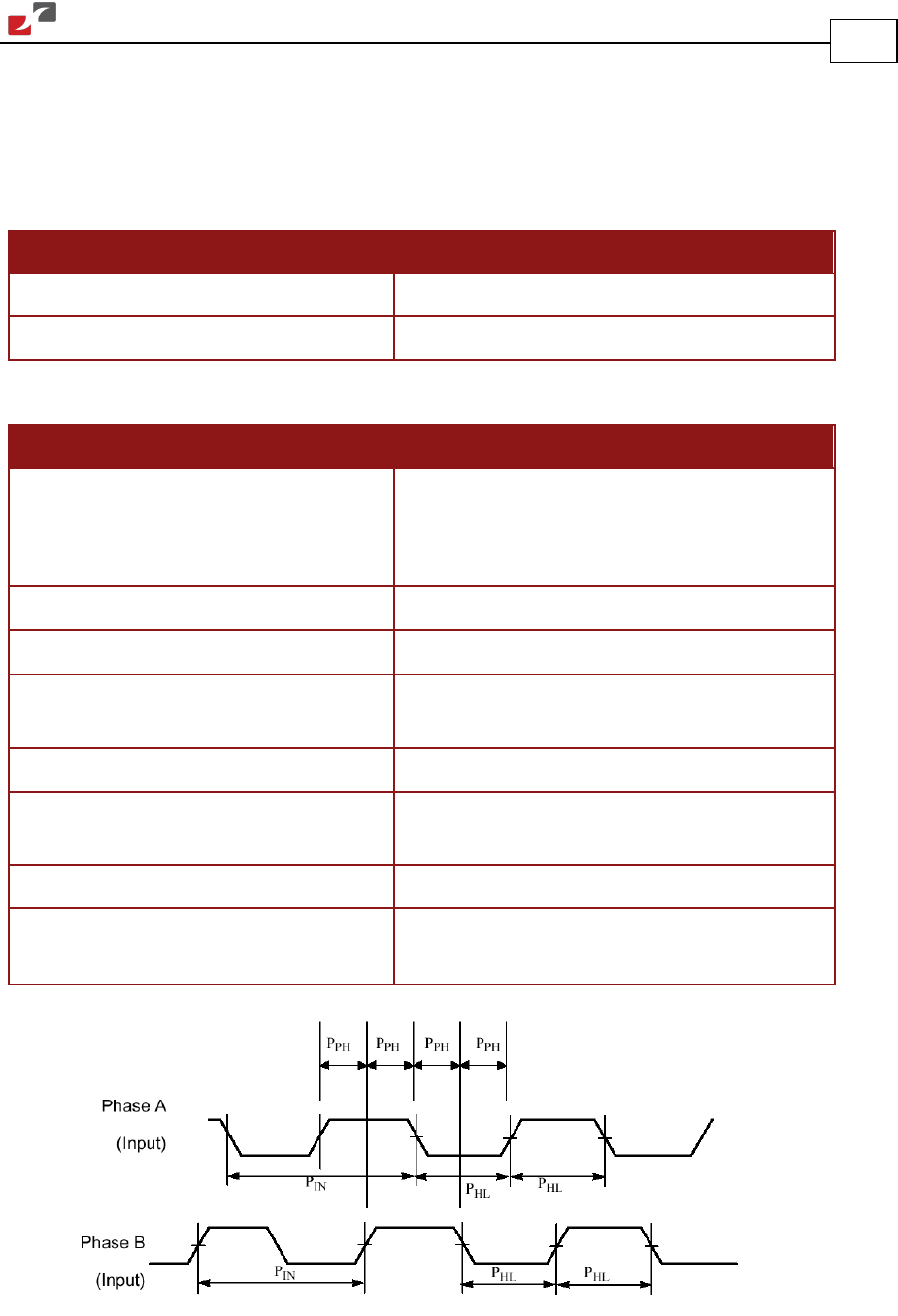
Minimum quadrature input period (PIN) 112 nsec
Minimum quadrature input high/low
period (P
HL)
56 nsec
Minimum quadrature phase period (PPH) 28 nsec
Maximum encoder input voltage range
Common mode: ±7 V
Differential mode: ±7 V
Figure 31: Encoder Phase Diagram