
Manual










Table Of Contents
- Chapter 1: Safety Information
- Chapter 2: Introduction
- Chapter 3: Installation
- 3.1. Before You Begin
- 3.2. Unpacking the Drive Components
- 3.3. Assembling the Heatsink
- 3.4. Mounting the Bassoon
- 3.5. Connecting the Cables
- 3.5.1. Wiring the Bassoon
- 3.5.2. Connecting the Power Cables
- 3.5.3. Connecting the Auxiliary Power Cable (J4)
- 3.5.4. Feedback and Control Cable Assemblies
- 3.5.5. Main Feedback Cable (Port J3)
- 3.5.6. Main and Auxiliary Feedback Combinations
- 3.5.6.1. Main Encoder Buffered Outputs or Emulated Encoder Outputs Option on Feedback B (J2) (YA[4]=4)
- 3.5.6.2. Differential Auxiliary Encoder Input Option on Feedback B (J2) (YA[4]=2)
- 3.5.6.3. Single-Ended Auxiliary Input Option on Feedback B (J2) (YA[4]=2)
- 3.5.6.4. Pulse-and-Direction Input Option on FEEDBACK B (J2) (YA[4]=0)
- 3.5.7. I/O Cables
- 3.5.8. Communication Cable (Port J1, J8, J9)
- 3.6. Powering Up
- 3.7. Initializing the System
- Chapter 4: Technical Specifications
Bassoon Installation Guide Technical Specifications
MAN-BASIG (Ver. 1.502)
www.elmomc.com
57
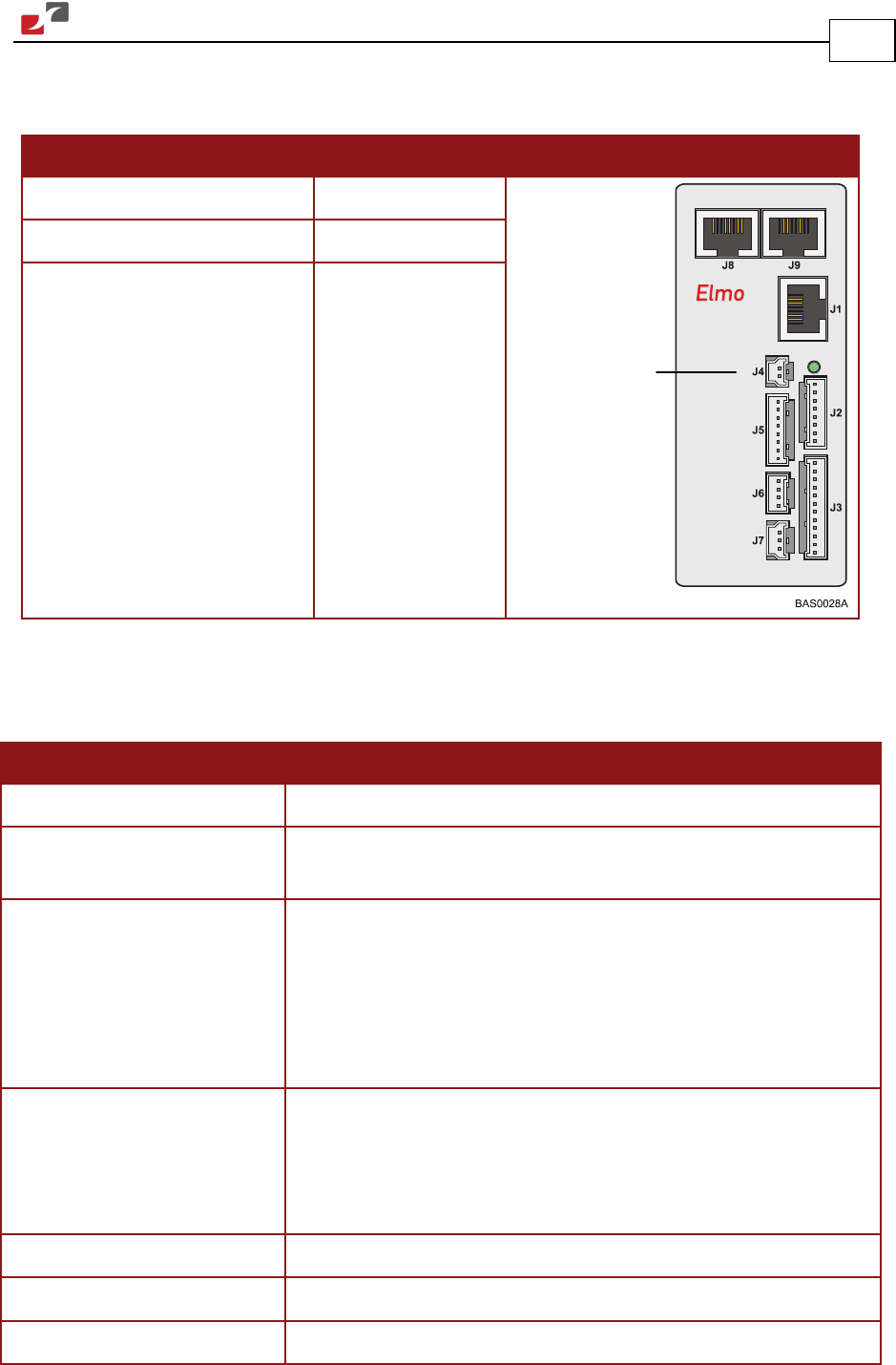
4.5. Auxiliary Power Supply (J4)
Feature Details Connector Location
Auxiliary power supply DC source only
Auxiliary supply input voltage 24 V ±20%
Auxiliary supply input power 8 VA (maximum)
4.6. Control Specifications
4.6.1. Current Loop
Feature Details
Controller type Vector, digital
Compensation for bus voltage
variations
On-the-fly automatic gain scheduling
Motor types
• AC brushless (sinusoidal)
• DC brushless (trapezoidal)
• DC brush
• Linear Motors
• Moving coils
Current control
• Fully digital
• Sinusoidal with vector control
• Programmable PI control filter based on a pair of PI controls of
AC current signals and constant power at high speed
Current loop bandwidth <2.5 kHz
Current sampling time
Programmable 70 to 100 µsec
Current sampling rate Up to 16 kHz; default 11 kHz
Auxiliary
Power
supply