
- Siemens Cordless Telephone User Manual










Servo control
3.13 Pole position identification
Drive Functions
98 Function Manual, (FH1), 07/2007 Edition, 6SL3097-2AB00-0BP4
5
6
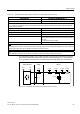
0RWRU&DEOH
/
˰6
/
YDU
6HULHVLQGXFWDQFH
5
FDEOH
0RWRU0RGXOH
S S
S>0@
S>0@
S>0@
S>0@
S>0@
0RWN(
Figure 3-19 Equivalent circuit diagram for synchronous motor and cable
Overview of key parameters (see SINAMICS S List Manual)
● r0047 Status identification
Standstill measurement
● p1909 Motor data identification control word
● p1910 Motor data identification, stationary
Rotating measurement
● p1958 Motor data identification ramp-up/ramp-down times
● p1959 Rotating measurement configuration
● p1960 Rotating measurement selection
3.13 Pole position identification
Description
For synchronous motors, the pole position identification determines its electrical pole
position, that is required for the field-oriented control. Generally, the electrical pole position is
provided from a mechanically adjusted encoder with absolute information. In this case, pole
position identification is not required. For the following encoder properties, pole position
identification is not required:
● Absolute encoder (e.g. EnDat)
● Encoder with C/D track and pole pair number ≤ 8