
User's Manual










DIGITAL CONTROL INCORPORATED
DigiTrak Falcon
F2
Operator’s Manual 51
Target Steering
The Target Steering
locating method allows the Falcon F2 receiver to be placed ahead of
the drill head and used as a steering target.
In general, Target Steering should be used to maintain a bore path, not
to bring a significantly off-course bore back on track. If needed, use front
and rear locate methods to get back on course.
Locate Points (FLP &
RLP) and Locate Line (LL)
Page 37
Note After learning the concepts of Target Steering, practice its use before
using on a jobsite where time and money are at a premium. A Look-Ahead
Locating animation is also available at www.youtube.com/dcikent. If you
need further assistance, please contact DCI Customer Service.
The Falcon Compact Display supports Remote Steering, which provides
left/right steering guidance but not depth. For Target Steering at the drill,
DCI recommends the Aurora touchscreen remote display.
Using the receiver for Target Steering requires a stable signal from the transmitter.
Target Steering will not work properly with passive interference in the
vicinity of the bore.
Interference
Page 34
Feasible Target Depth
The maximum distance the receiver can be placed ahead of the drill head for Target Steering
is 10.7 m. Beyond this distance, depth information becomes less accurate. Within this range,
starting with the drill head approximately level, the following parameters apply to depth data:
The maximum depth change is approximately 1.2 m.
The maximum pitch change is approximately 14%.
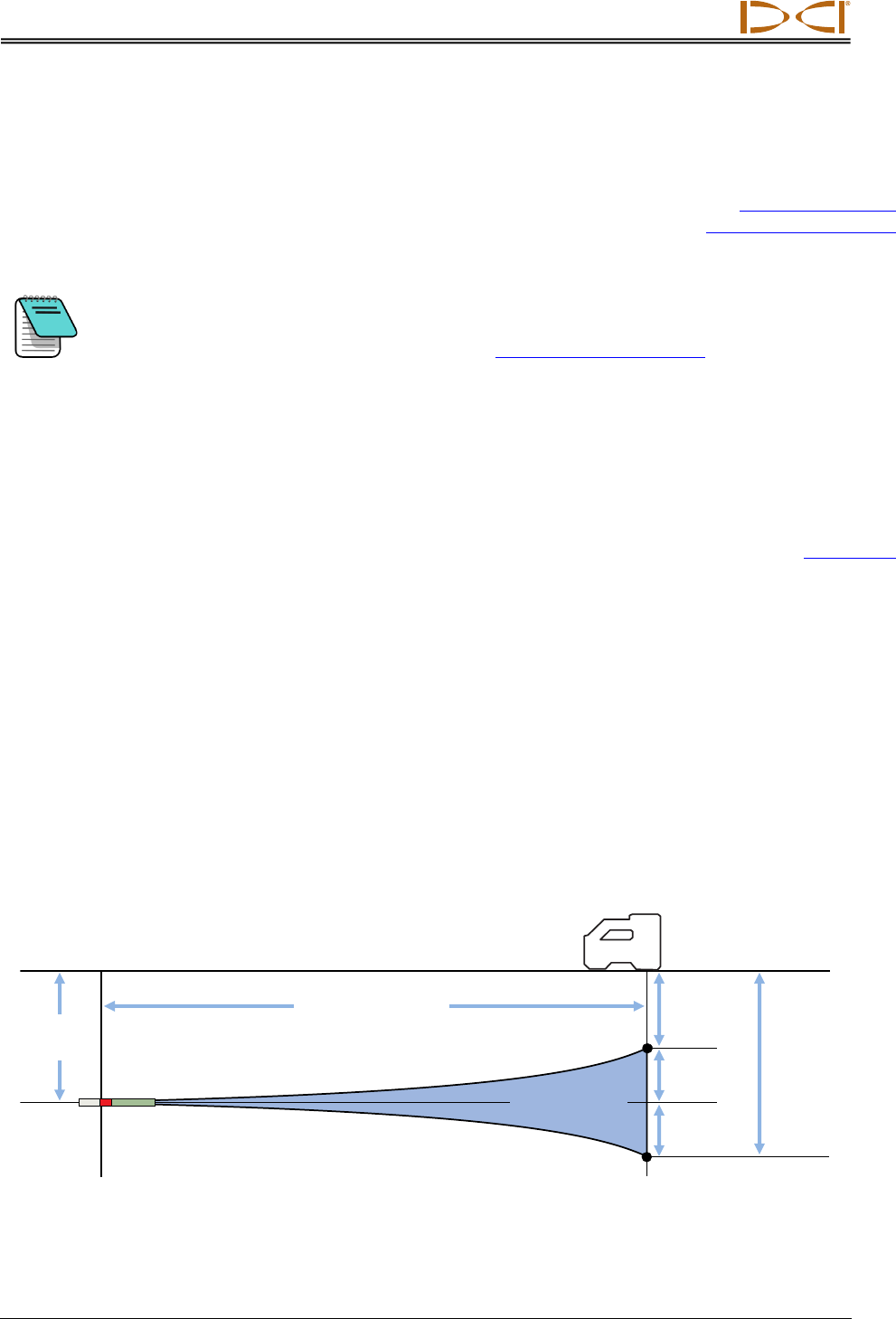
For the most conservative Target Steering operation, assume the ideal drill path is a circular
arc with a radius that accommodates the bend radius of most drill strings and products being
installed. As shown in the diagram below, the feasible steering area is limited to the shaded
region bounded by the two circular arcs.
Feasible Target Steering Area
Current
depth
Transmitter
Surface of ground
Horizontal distance
10.7 m max
Target
Target
Feasible target
steering area
Minimum
target
depth
Maximum
target
depth
Depth change
1.2 m max
Depth change
1.2 m max