
Data Sheet




ROBOT.HEAD to TOE
Datasheet-MD10-POT
1. BOARD LAYOUT & FUNCTION
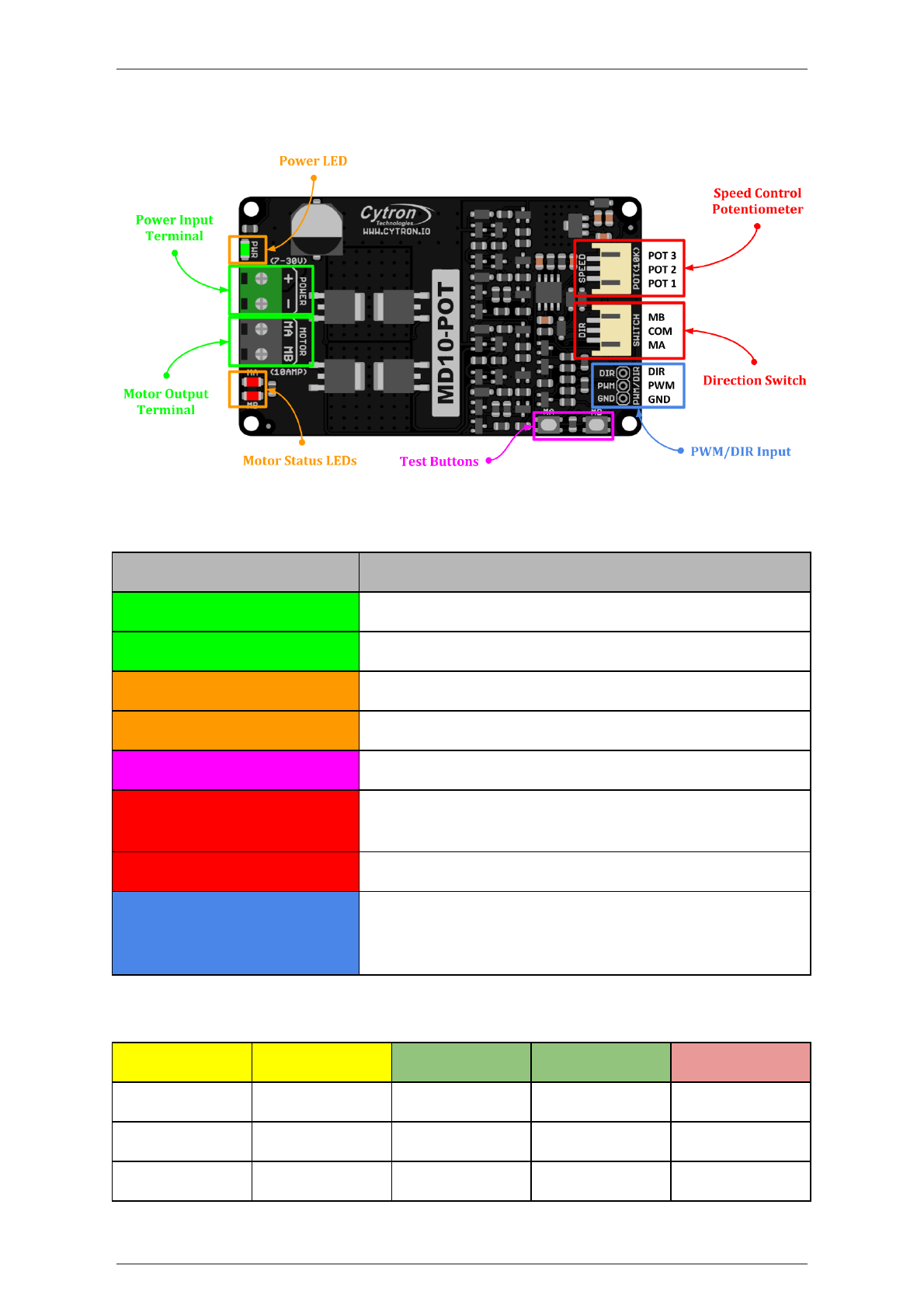
Figure 1: MD10-POT Board Functions
Function
Description
Power Input Terminal
Connecttobattery.
Motor Output Terminal
Connecttomotor.
Power LED
Turnonwhenpowerup.
Motor Status LEDs
Turnonwhenthemotorisrunning.
Test Buttons
Presstotestthefunctionalityofthemotor/driver.
Speed Control
Potentiometer
Connectto10KΩpotentiometerformotorspeed
control.
Direction Switch
ConnecttoSPDTSwitchformotordirectioncontrol.
PWM/DIR Input
UsethistocontrolthemotorwithPWMsignal.
DIRpinisusedfordirectioncontrol.
RefertoTable2belowfortruthtable.
Table 1: MD10-POT Board Functions
PWM
DIR
Output A (MA)
Output B (MB)
Motor
Low
X (Don’t Care)
Low
Low
Brake
High
Low
High
Low
Forward
High
High
Low
High
Reverse
Table 2: PWM/DIR Input Truth Table
CreatedbyCytron Technologies Sdn Bhd –AllRightsReserved1