
Technical data








Appendix
CPU 317T: Technology Functions
A-28 A5E00251798-03
Options available:
• APPROACH_NEGATIVE_PASSIVE(0)
Homing with approach to zero mark in negative direction
• APPROACH_POSITIVE_PASSIVE(1)
Homing with approach to zero mark in positive direction
• EDGE_POS_SIDE_NEG_PASSIVE(2)
Homing with approach to BERO in positive direction
• EDGE_POS_SIDE_POS_PASSIVE(3)
Homing with approach to Bero in negative direction
• EDGE_NEG_SIDE_NEG_PASSIVE(4)
Homing with motion off the BERO in positive direction
• EDGE_NEG_SIDE_POS_PASSIVE(5)
Homing with motion off the Bero in negative direction
• ACTUAL_DIRECTION_PASSIVE(6)
Homing with the next edge at BERO or zero mark
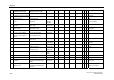
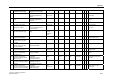
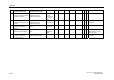
The selection of the approach direction depends on the homing mode. The table
below shows the relationship between the approach direction and the homing
mode:
Homing mode
Approach direction CAM_AND_ZM_
PASSIVE(1)
ZM_
PASSIVE(2)
CAM_
PASSIVE(3)
DEFAULT_
PASSIVE(4)
APPROACH_NEGATIVE_PASSIVE(0)
X X F Gx
APPROACH_POSITIVE_PASSIVE(1)
X X F Gx
EDGE_POS_SIDE_NEG_PASSIVE(2)
F F X Gy
EDGE_POS_SIDE_POS_PASSIVE(3)
F F X Gy
EDGE_NEG_SIDE_NEG_PASSIVE(4)
F F X Gy
EDGE_NEG_SIDE_POS_PASSIVE(5)
F F X Gy
ACTUAL_DIRECTION_PASSIVE(6)
X X N Gx
X - valid configuration
F - invalid configuration
N - function not supported
Gx - encoder with zero mark (TTL, sine / cosine)
Gy - encoder without zero mark (Endat)
Note
Please not that the homing modes listed earlier are not supported by all drive
component (for details, refer to the corresponding documentation).