
Instruction manual



1-10
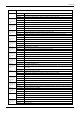
Error no. C126n (n indicates the axis number (1 to 8).)
1Error list
C126n
(n indicates the
axis number (1
to 8).)
Error message Encoder communication error
Cause Initial communication could not be established with the low-speed serial type absolute position linear scale.
Measures Check the detector cable connection and conductivity. When it comes back, contact to the dealer.
C127n
(n indicates the
axis number (1
to 8).)
Error message Encoder communication error
Cause The serial data of absolute position was abnormally transmitted.
Measures Check the detector cable connection and conductivity. Also, carefully check whether there is no deviation
in the operating position of the robot. If it is deviated, set the origin position (OP) again. For more informa
-
tion about the operating procedure, refer to the separate volume, "Instruction Manual/Robot Arm Setup to
Maintenance."
When it comes back, contact to the dealer.
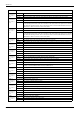
C128n
(n indicates the
axis number (1
to 8).)
Error message Encoder serial format error
Cause Absolute position serial data format was incorrect.
Measures Check the detector cable connection and conductivity. Also, carefully check whether there is no deviation
in the operating position of the robot. If it is deviated, set the origin position (OP) again. For more informa
-
tion about the operating procedure, refer to the separate volume, "Instruction Manual/Robot Arm Setup to
Maintenance."
When it comes back, contact to the dealer.
C129n
(n indicates the
axis number (1
to 8).)
Error message Absolute position fluctuation
Cause The absolute position data fluctuated when the power was turned ON.
Measures Check whether the axis moved due to arm dropping or external force when the power was turned ON.
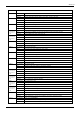
C130n
(n indicates the
axis number (1
to 8).)
Error message Servo AMP MP scale F/B error
Cause Excessive displacement was detected in the feedback amounts between the detector and the MP scale.
Measures Turn the power OFF and ON once. When it comes back, contact to the dealer.
C131n
(n indicates the
axis number (1
to 8).)
Error message Servo AMP MP scale offset error
Cause Excessive displacement was detected in the feedback amounts between the detector and the MP scale.
Measures Turn the power OFF and ON once. When it comes back, contact to the dealer.
C132n
(n indicates the
axis number (1
to 8).)
Error message Multi-rotation data error
Cause An error was detected in the position detector's multi-rotation data.
Measures Turn the power OFF and ON once. When it comes back, contact to the dealer.
C133n
(n indicates the
axis number (1
to 8).)
Error message Encoder battery voltage low
Cause The battery voltage supplied to the position detector dropped.
Measures Replace the backup battery. For more information about the replacement procedure, refer to the separate
volumes, "Instruction Manual/Robot Arm Setup to Maintenance"
.
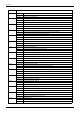
C134n
(n indicates the
axis number (1
to 8).)
Error message Over-regeneration warning
Cause The regenerative level of the additional axis has risen to 80% or more.
Measures Check the regenerative capacity and parameters for the additional axis.
C135n
(n indicates the
axis number (1
to 8).)
Error message Overload warning
Cause The overload level reached 80% or more.
Measures Check the load weight and the robot for collisions, etc.
H136n *
(n indicates the
axis number (1
to 8).)
Error message Absolute position counter error
Cause The counter of absolute position is illegal.
Measures Replace the batteries of both the robot arm and controller.
C137n
(n indicates the
axis number (1
to 8).)
Error message Illegal parameter (servo)
Cause A parameter was set exceeding the setting range.
Measures The parameter has not been changed. Reset the correct value. When it comes back, contact to the dealer.
C138n
(n indicates the
axis number (1
to 8).)
Error message Removing control axis (servo)
Cause An instruction to remove the axis was issued by the controller.
Measures Cancel the instruction of removing axis.
H139n
(n indicates the
axis number (1
to 8).)
Error message Emergency stop (Servo amplifier)
Cause The controller emergency stop is being input.
Measures Release the emergency stop state.
Error No. Error cause and measures