
Instruction Manual










© BriskHeat
®
Corporation. All rights reserved.
18
LYNX
TM
System Instructions
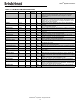
Name Address Default Factory
Default
R/
W
Description
Unused 0 Unused register
Modbus watchdog 2 10 Y RW Number of seconds for the Modbus watchdog timer (if enabled). When
this time expires without a valid Modbus command, the device restarts.
Device ID 3 3 R Identifies what the device is (value 3 is LYNX Module)
Firmware version 4 5 R Current version of the firmware
Settings 5 0 Y RW Bitfield that specifies other settings. See settings table for more infor-
mation.
Current temperature 6 R Temperature in units of 0.01 degrees Celsius. Divide by 100 to get
actual temperature
Status 7 R Bitfield that expresses the current condition of the Module, see table for
bit definitions
Status2 8 R Bitfield that expresses the current condition of the Module, see table for
bit definitions
Current 9 R Measured RMS current of the jacket. Units of milliamps.
Duty cycle calc 10 R The actual Duty cycle of the Module. On off Mode simply reports 0 or
100% Duty cycles.
Temperature Setpoint 11 5000 Y RW Temperature setpoint in units of 0.01 degrees Celsius. Divide by 100 to
get actual temperature setpoint
Hysteresis 12 10 Y RW Hysteresis in units of 0.01 degrees C, used in on/off control Mode only,
applied as a +- above and below the setpoint. Divide by 100 for the actu-
al temperature value
Manual Duty cycle 13 0 RW Manually specified Duty cycle in percent, ranges from 0 – 100.
Low Alarm 14 4000 Y RW Low Alarm temperature in units of 0.01 degrees C. Divide by 100 for
actual temperature.
High Alarm 15 6000 Y RW High Alarm temperature in units of 0.01 degrees C. Divide by 100 for
actual temperature.
Control Type 16 0 Y RW Defines the operation Mode of the controller, see table for value defini-
tions
Low Alarm timer 17 1800 Y RW Length of the Low Alarm Delay in seconds. The timer is reset whenever
the control type register is written and when the temperature setpoint is
updated.
Sensor type 18 4 Y RW Value determines the type of sensor attached to the Module.
Calibrate 1 19 12016 Y RW Use for calibrating RTD sensors
Calibrate 2 20 11786 Y R Holds the actual measurement for a calibrated RTD sensor
Modbus Address 21 1 Y W The default Modbus address the Module uses.
Modbus Address 21 R The current address the Module is responding to.
Reset 22 W Write anything to this register to reset the Module.
Period 34 610 Y RW Determines the frequency of PID and manual Duty cycle operation. Val-
ue is T(seconds) * 40,000,000/65535
Alarm latching 35 * Y RW Determines which Alarm conditions are latching. See status register
table.
Alarm Latching2 36 * Y RW Determines which Alarm conditions are latching. See status2 register
table.
Alarm Clearing 37 W Any bits cleared when writing this register will attempt to unlatch the
corresponding Alarm. See status register table.
Alarm Clearing2 38 W Any bits cleared when writing this register will attempt to unlatch the
corresponding Alarm. See status2 register table.
Modbus baud Rate 39 11520 Y RW Defines the baud Rate in units of 10 bits per second. Multiply by 10 to
get the actual baud Rate in bits per second.
PID P Value 40 55 Y RW The proportional value for PID control.
PID I Value 41 1 Y RW The integral value for PID control.
PID D Value 42 1500 Y RW The derivative value for PID control.
Module temperature 43 R Measure internal temperature of the Module in units of 0.01 degrees C.
Divide by 100 to get actual temperature in degrees C.
Factory default 44 W Write the value 0x4674 to factory default the Module.
TABLE 3: LYNX MODULE MODBUS REGISTERS
ALARM CLEAR REGISTER
The Alarm clear register (register 37 and 38) is a bitfield that clears latched Alarms when written. See status register for definition of bits.
ALARM LATCHING REGISTER
The Alarm latching register (register 35 and 36) is a bitfield that determines which Alarms latch. See status register for definition of bits.