
Operating instructions










Commands Communication protocol
40 KNF Flodos CP_SIMDOS02_EN_01_166851
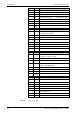
Byte 2 value System - status
Bit 0
[ 1 ] [ 0 ] motor not adjusted, [ 1 ] motor adjusted
1
[ 2 ] [ 0 ] I/O 1 input low, [ 2 ] I/O 1 input high
2
[ 4 ] [ 0 ] I/O 2 input low, [ 4 ] I/O 2 input high
3
[ 8 ] [ 0 ] motor not on UT, [ 8 ] motor on UT
4
[ 16 ]
5
[ 32 ]
6
[ 64 ]
7
[ 128 ]
Byte 3
value
Run mode - status
Bit 0
[ 1 ] [ 0 ] RUN-mode stopped
[ 1 ] RUN-mode started
1
[ 2 ]
2
[ 4 ]
3
[ 8 ]
4
[ 16 ]
5
[ 32 ]
6
[ 64 ]
7
[ 128 ]
Byte 4
value
Dispense mode - status
Bit 0
[ 1 ] [ 0 ] Dispense-mode stopped
[ 1 ] Dispense-mode started
1
[ 2 ]
2
[ 4 ]
3
[ 8 ] [ 0 ] user stop active
[ 8 ] user stop NOT active
4
[ 16 ]
5
[ 32 ]
6
[ 64 ]
7
[ 128 ]
Byte 6 value Fault diagnosis
Bit 0
[ 1 ] [ 1 ] Overpressure,
1
[ 2 ] [ 2 ] Reserved
2
[ 4 ] [ 4 ] Reserved
3
[ 8 ] [ 8 ] Analog signal under 4 mA
4
[ 16 ] [ 16 ] Power supply failure
5
[ 32 ] [ 32 ] Motor error
6
[ 64 ] [ 64 ] Temperature exceeded
7
[ 128 ] [ 128 ] No encoder sensor signal
See section 10.2
Remarks: