
User manual









Obr. 6a: Přenos programu Obr. 6b: Přenos programu dokončen
Nyní můžete odstranit USB kabel a odpojit robota od PC, připojit pouzdro s bateriemi, nebo napájení
a zapnout robota.
Pro další informace a soubory ke stažení navštivte fórum na jedné ze stránek:
www.arexx.com > Forum
www.roboternetz.de > Forum
Základní informace k obvodům H - můstku
H můstek je elektronický obvod, který umožňuje obrátit polaritu zařízení (jako např. DC motor) pomocí
čtyř přepínačů. H můstky se v robotice často používají pro ovládání otáček motoru v opačných
směrech.
V moderních systémech se k ovládání motoru sice používají integrované obvody, ale pro pochopení
základů a rozměru problémů spojených s napájecími zdroji může být důležité prostudovat si archaický
obvod ovládání motoru.
H můstek pro 3 V napájecí zdroje
Řídící obvod Hyper-Peppy robotů obsahuje dva tranzistory TR7 a TR8, respektive NPN tranzistory
TR9 a TR10. V našem schématu může být proud veden zároveň do motoru M vždy jen dvěma
tranzistory:
Přes TR7 a TR10, nebo
Přes TR8 a TR9.
Volně dostupná testovací verze programu Micro Cap nám umožňuje pohodlně propočítat simulaci DC
a přečíst si hodnoty v okně schématu:
Obr. 8: Simulace H můstku v robotovi Hyper Peppy
V řídící části můžeme vidět DC motor M. Předzesilovač řídícího obvodu je simulován rezistorem R14,
který drží základní porty tranzistorů TR6 a TR5 na 0V, což má za následek, že signifikantní proud
je veden jen pravou větví.
Proud prochází tranzistory TR8, TR5 a TR9, zatímco ostatní tranzistory jsou blokovány. Jakmile se
přepínač R14 přepne na kladné napětí, pravá větev se zablokuje a proud v motoru se obrátí.
Simulátor Micro Cap nám umožňuje vypočítat proudy pro všechny komponenty a přečíst si hodnoty
v okně schématu. Celkový napájecí proud v případě baterií s napětím 3 V bude kolem 300 mA.
Pozoruhodně nízké napájecí napětí obvodu je založeno na kombinaci křemíkových PNP a NPN
tranzistorů, které pracují s napětím 0,7 V. Motor je osazen mezi dva porty kolektorů, které v ideálním
případě zaznamenávají pokles napětí jen 0,3 V. V praxi tak pro motor zůstává slušná hodnota 1,5 V.
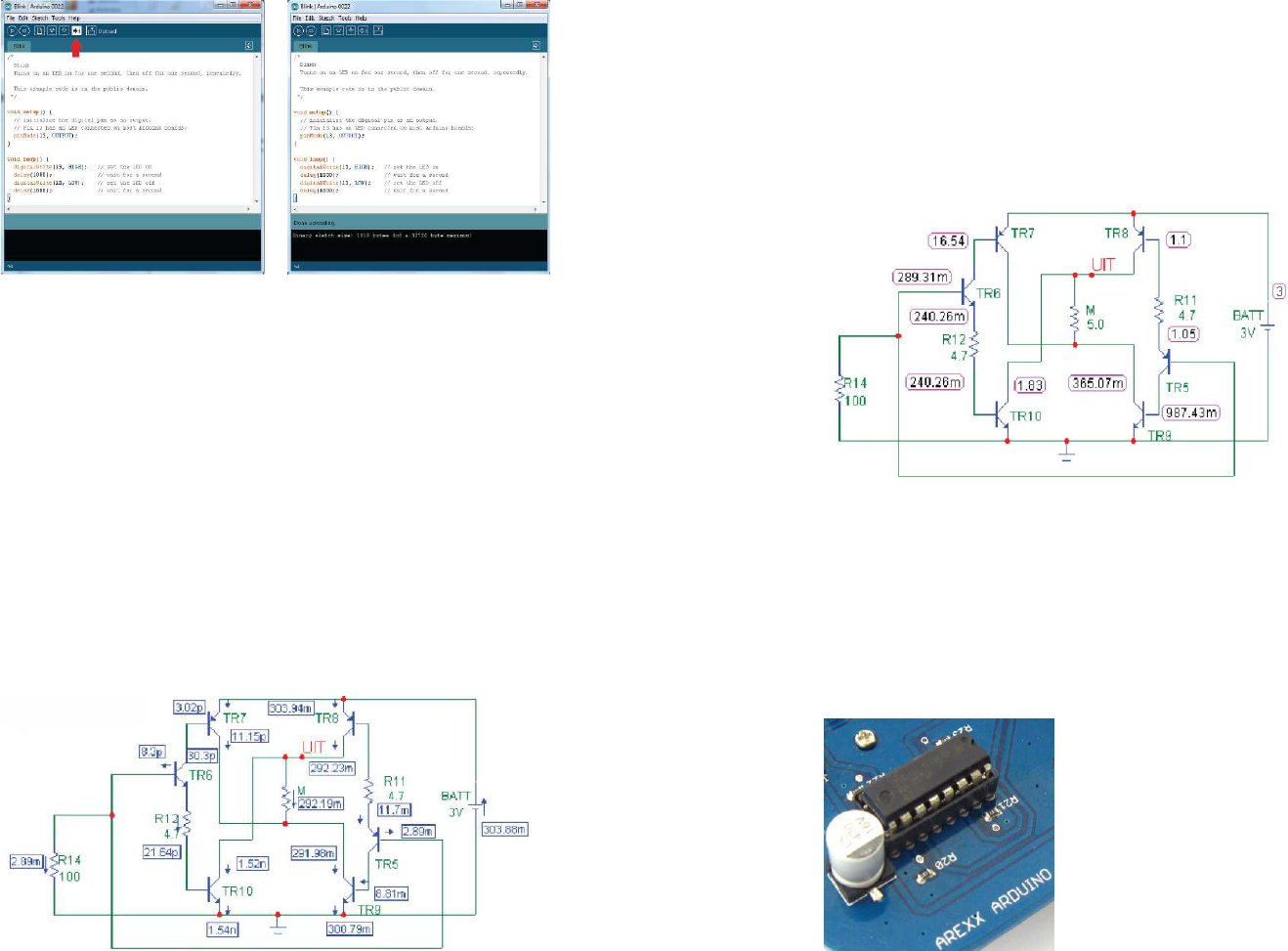
Hodnoty vypočteny programem Micro Cap, vidíte na obrázku 9.
Obr. 9: Nastavení DC pro H můstek u robota Hyper Peppy
Ideální řešení pro robota představuje napájecí zdroj 3 V, který tvoří jen 2 bateriové články. PNP
tranzistory lze nicméně do integrovaného obvodu, jakým je L293D zakomponovat jen poměrně složitě.
Integrovaný obvod má však jiné výhody, jako je spolehlivost, ochranné diody, které chrání tranzistory
před poškozením a zmenšená plocha DPS související s nízkou hmotností. Proto jsme se rozhodli
použít čip L293D, v kterém jsou dva H-můstky pro ovládání dvou DC motorů.
H-můstek pro napětí 4,5 V
Čip L293D (viz obr. 10) nám umožňuje regulovat výstupní proud až 600 mA na kanál (max. proud ve
špičce: 1,2 A). Napájecí napětí ovladačů (VCC2) může být v rozsahu mezi 4,5 V až 36 V, což dělá z
čipu L293D oblíbený obvod pro ovládání DC motoru.
Protože minimální napájecí napětí (VCC2) je stanoveno na 4,5 V, jsme nuceni zvolit jako zdroj
napájení minimálně 4 nabíjecí akumulátory. Touto investicí se zvyšuje celková hmotnost robota, což je
cena za moderní elektronický obvod.
Obr. 10: H-můstek s integrovaným obvodem L293D