
User`s manual










Table Of Contents
- MPC-684 family
- The feature of the MPC-684
- Program development environment
- How to connect
- Input commands
- I/O check
- How to input program
- Edit of a program
- How to program save to the PC, load from the PC
- I/O control
- Variable, Array variable, String variable, Memory I/O
- Calculation
- Pulse generation
- Multi-task
- RS-232 communication
- Debugging
- Use touch panel
- Command List
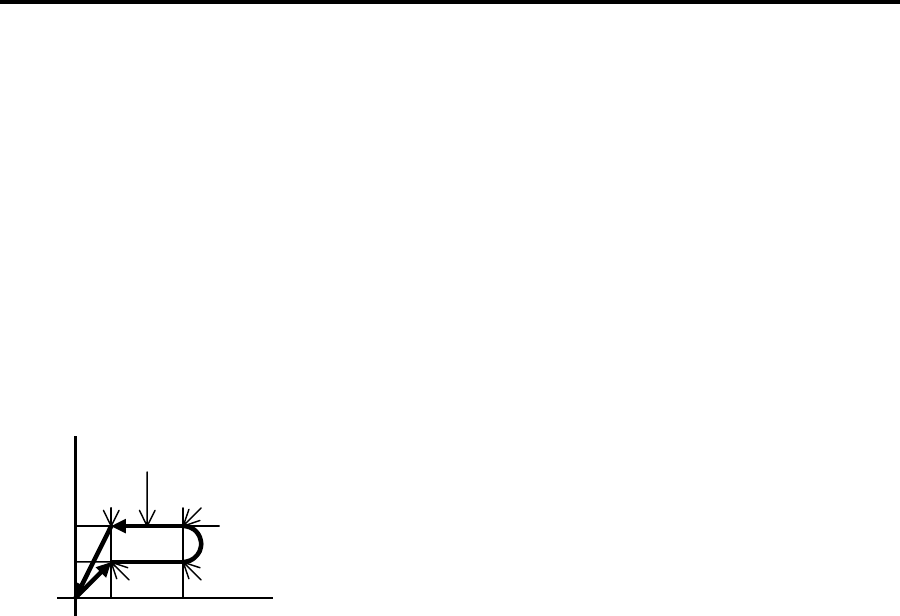
Continuous interpolation
The following figure is an example of continuous interpolation by using the MOVT
command.
It sets point data between the 10 line and the 50 line.
In this case, P(100) is the base point of the coordinates. P(101)~P(104) are local points
(relative coordinates to the base point).
The MPC interpreter reads a MOVT command then executes it. The MPC interpreter
reads the next program step while the previous step is being executed. If you use the
I/O port to control an action in the middle of any program step (that is being executed)
you have to consider the time gap between the working position and the next program
execution step.
The following program is output #0 turn on from P(101) to P(102).
3000
2000
X
Y
0
0
P(100) P(101)
P(102)
P(103)
P(104)
1000
1000
10 SETP 100 0 0 0 0 /* the base point
20 SETP 101 2000 0 0 0
30 SETP 102 2000 1000 2000 500
40 SETP 103 1000 1000 0 0
50 SETP 104 0 1000 0 0
60 PG &H400
70 ACCEL 5000
80 STPS 0 0 0 0
90 MOVL 1000 1000 VOID VOID /* move to the base point
100 WAIT RR(ALL_A)==0
110 HOUT X_A;DS_DACL /* acceleration/deceleration disable
120 MOVT X_A¦Y_A P(101)
130 MOVT X_A¦Y_A P(102) CCW
140 MOVT X_A¦Y_A P(103) /* dummy point for output #0 turn off at P(102)
150 ON 0 /* output #0 turn on from P(101) to P(102)
160 MOVT X_A¦Y_A P(104)
170 OFF 0
180 HOUT X_A;EN_DACL /* acceleration/deceleration enable
190 WAIT RR(ALL_A)==0
200 MOVL 0 0 VOID VOID
30